電験3種機械科目の過去問解説です。平成28年 問題6「各種回転機の特徴」について、直流分巻電動機・誘導電動機・同期電動機のトルク発生メカニズムを徹底解説します。
各種回転機の特徴 — トルク発生のメカニズム
電験3種の機械科目では、様々な種類の電動機(モーター)が登場します。それぞれの電動機は構造も動作原理も異なりますが、「どのようにしてトルク(回転力)が発生するのか?」という根本的なメカニズムを理解しておくことが非常に重要です。今回は、平成28年の問題6を題材に、直流分巻電動機、誘導電動機、同期電動機の3つの代表的な電動機について、そのトルク発生の仕組みを比較しながら解説します。
問題文(平成28年 問題6)
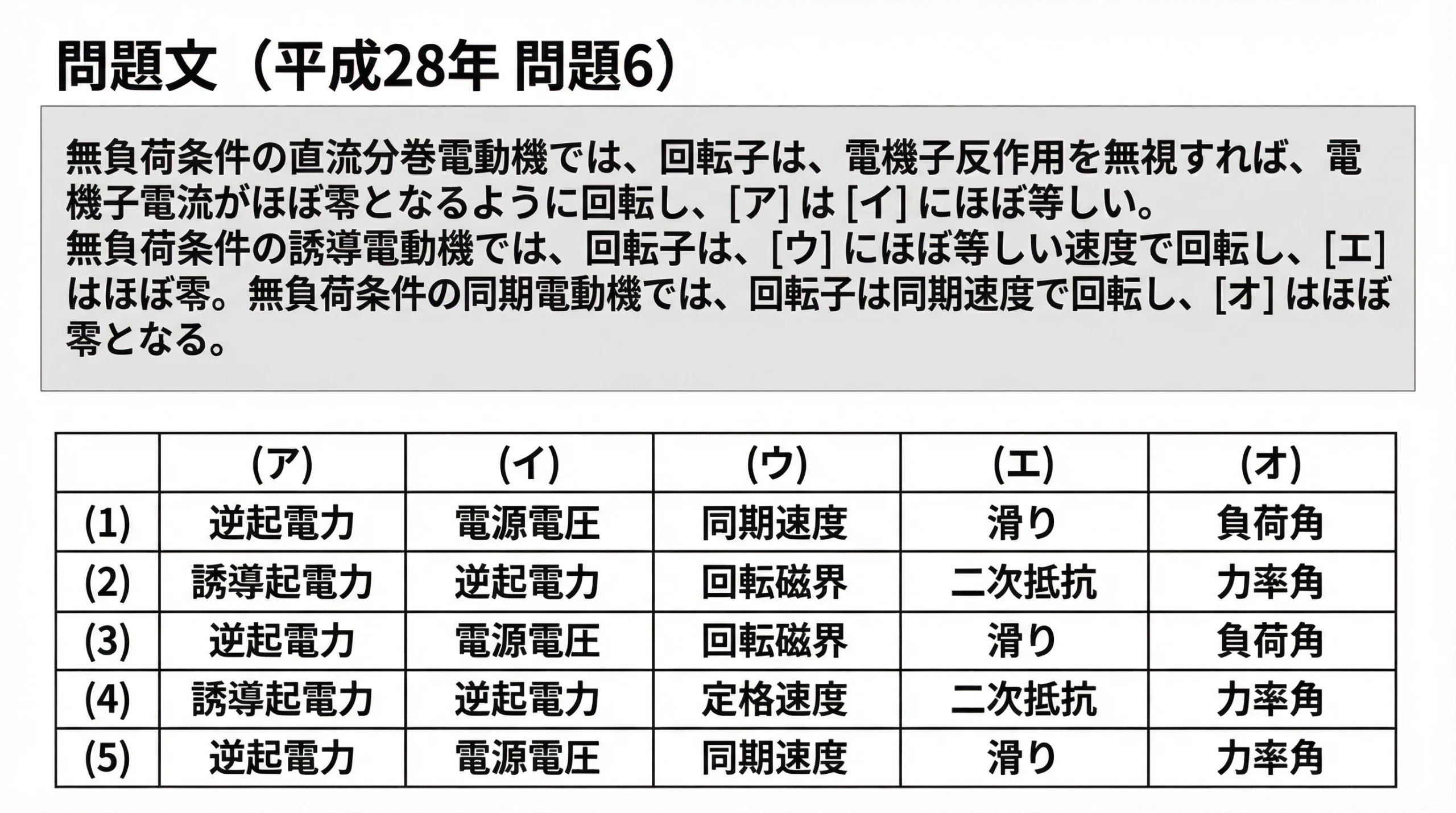
次の文章は,電源電圧一定(交流機の場合は多相交流巻線に印加する電源電圧の周波数も一定.)の条件下における各種電動機において,空回しの無負荷から,負荷の増大とともにトルクを発生する現象に関する記述である.
無負荷条件の直流分巻電動機では,回転速度に比例する 【ア】 と 【イ】 とがほぼ等しく,電機子電流がほぼ零となる.この状態から負荷が掛かって回転速度が低下すると,電機子電流が増大してトルクが発生する.
無負荷条件の誘導電動機では,周波数及び極数で決まる 【ウ】 と回転速度とがほぼ等しく,【エ】 がほぼ零となる.この状態から負荷が掛かって回転速度が低下すると,【エ】 が増大してトルクが発生する.
無負荷条件の同期電動機では,界磁単独の磁束と電機子反作用を考慮した電機子磁束との位相差がほぼ零となる.この状態から負荷が掛かっても回転速度の低下はないが,上記両磁束の位相差,すなわち 【オ】 が増大してトルクが発生する.
問題の概要・条件整理
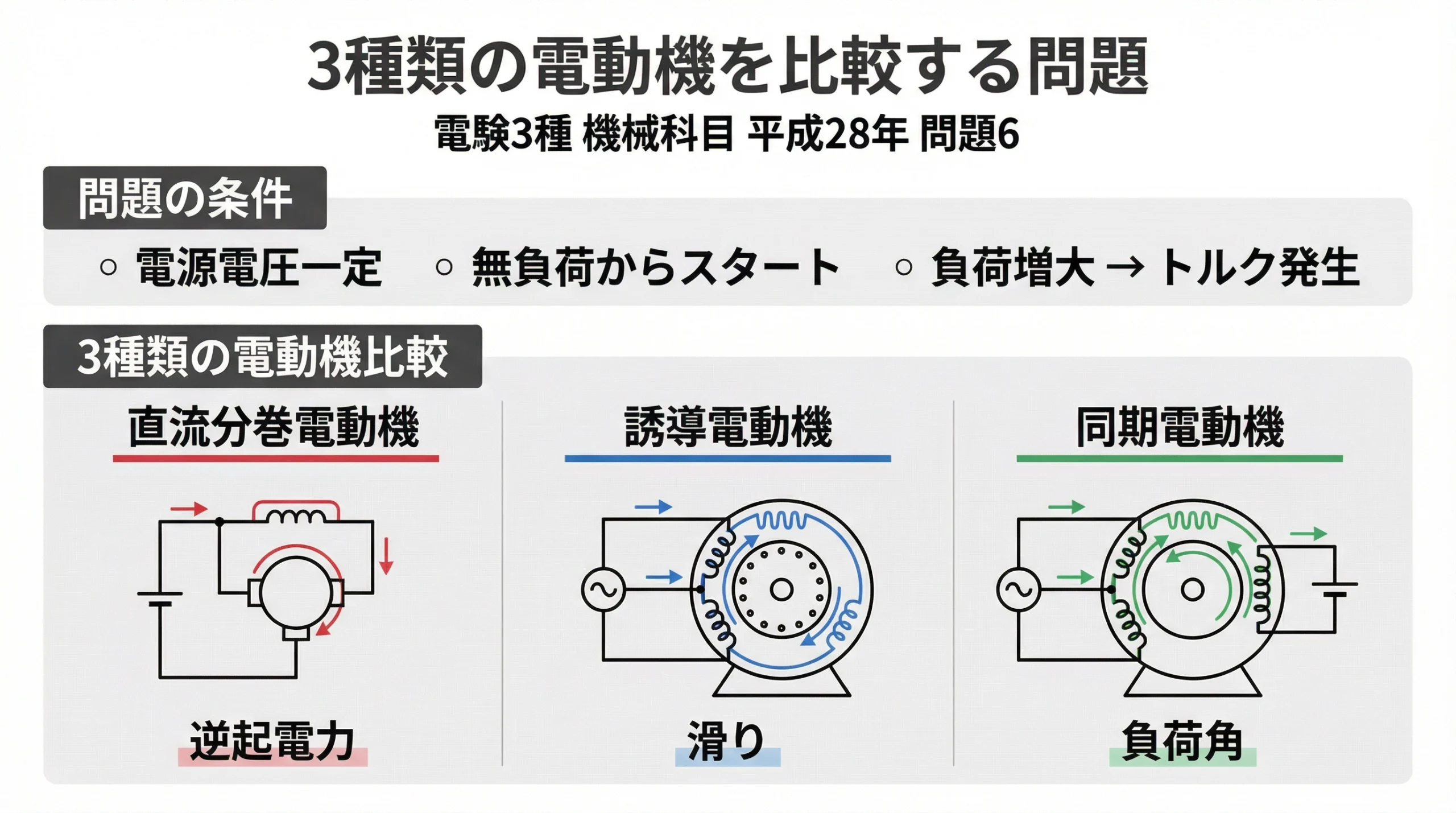
問題を解く前に、条件を整理しましょう。すべての電動機は「電源電圧一定」で運転されています。無負荷(空回し)の状態では、電動機は自分自身の損失(摩擦や風損など)に打ち勝つだけのわずかなトルクしか出していません。そこに負荷(荷物)がつながると、電動機はより大きなトルクを出そうとします。その際、電動機内部で何が起こるのか? それがこの問題のテーマです。
(a) 直流分巻電動機のトルク発生メカニズム
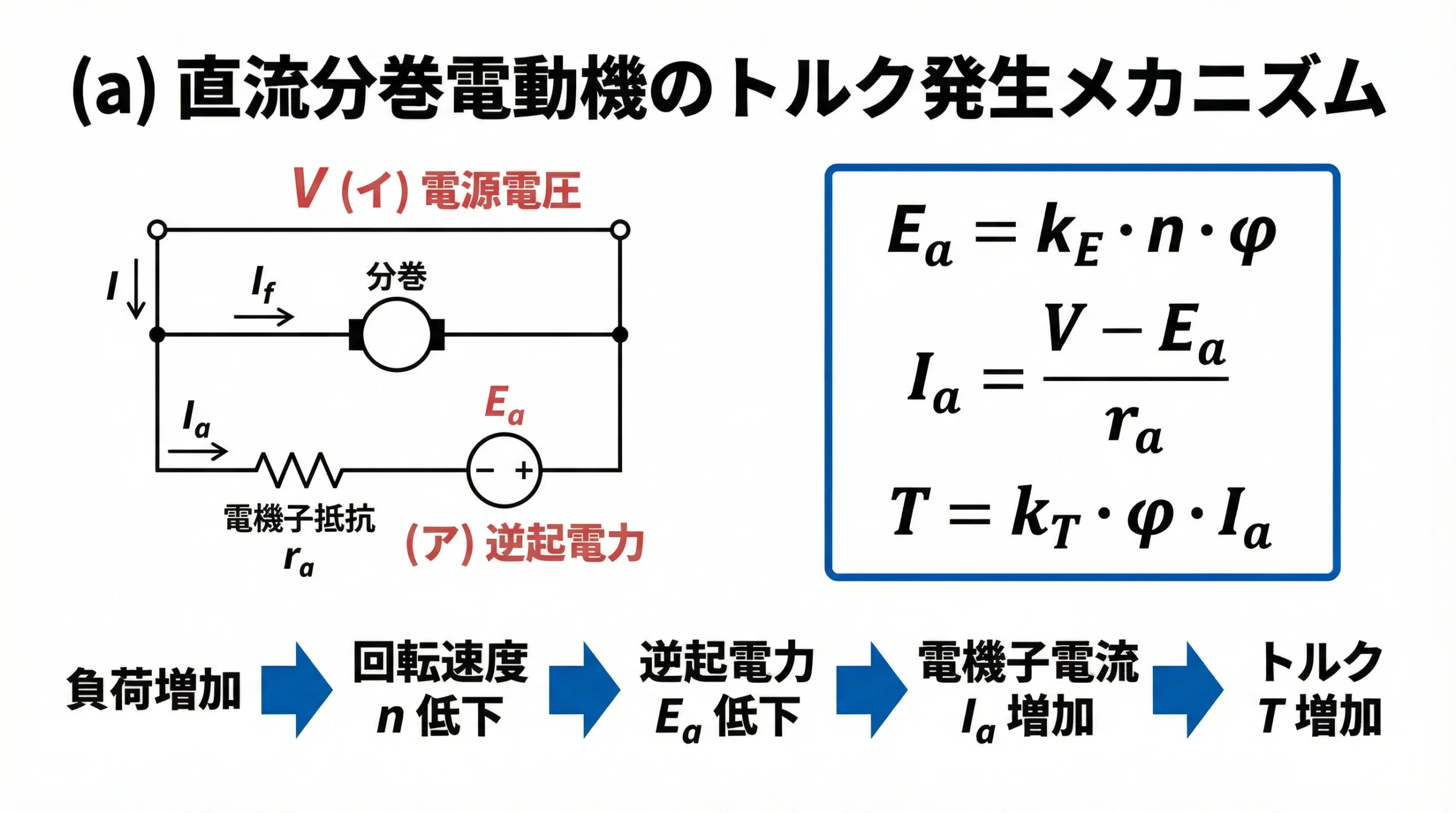
直流分巻電動機では、回転速度 \(n\) に比例して逆起電力(\(E_a\))が発生します。
\[ E_a = k_E n \phi \quad \cdots (1) \]
\[ I_a = \frac{V – E_a}{r_a} \quad \cdots (2) \]
\[ T = k_T \phi I_a \quad \cdots (3) \]
無負荷時は回転速度が非常に速いため、逆起電力 \(E_a\) は電源電圧(\(V\))とほぼ等しくなります。そのため、式(2)の分子 \(V – E_a\) がほぼゼロになり、電機子電流 \(I_a\) もほぼゼロになります。負荷がかかって回転速度 \(n\) が少し下がると、逆起電力 \(E_a\) が小さくなります。すると \(V – E_a\) の差が大きくなり、電機子電流 \(I_a\) が流れ込みます。電流 \(I_a\) が流れることで、式(3)に従ってトルク \(T\) が発生します。
結論:(ア) = 逆起電力、(イ) = 電源電圧
(b) 誘導電動機のトルク発生メカニズム — 同期速度と滑り
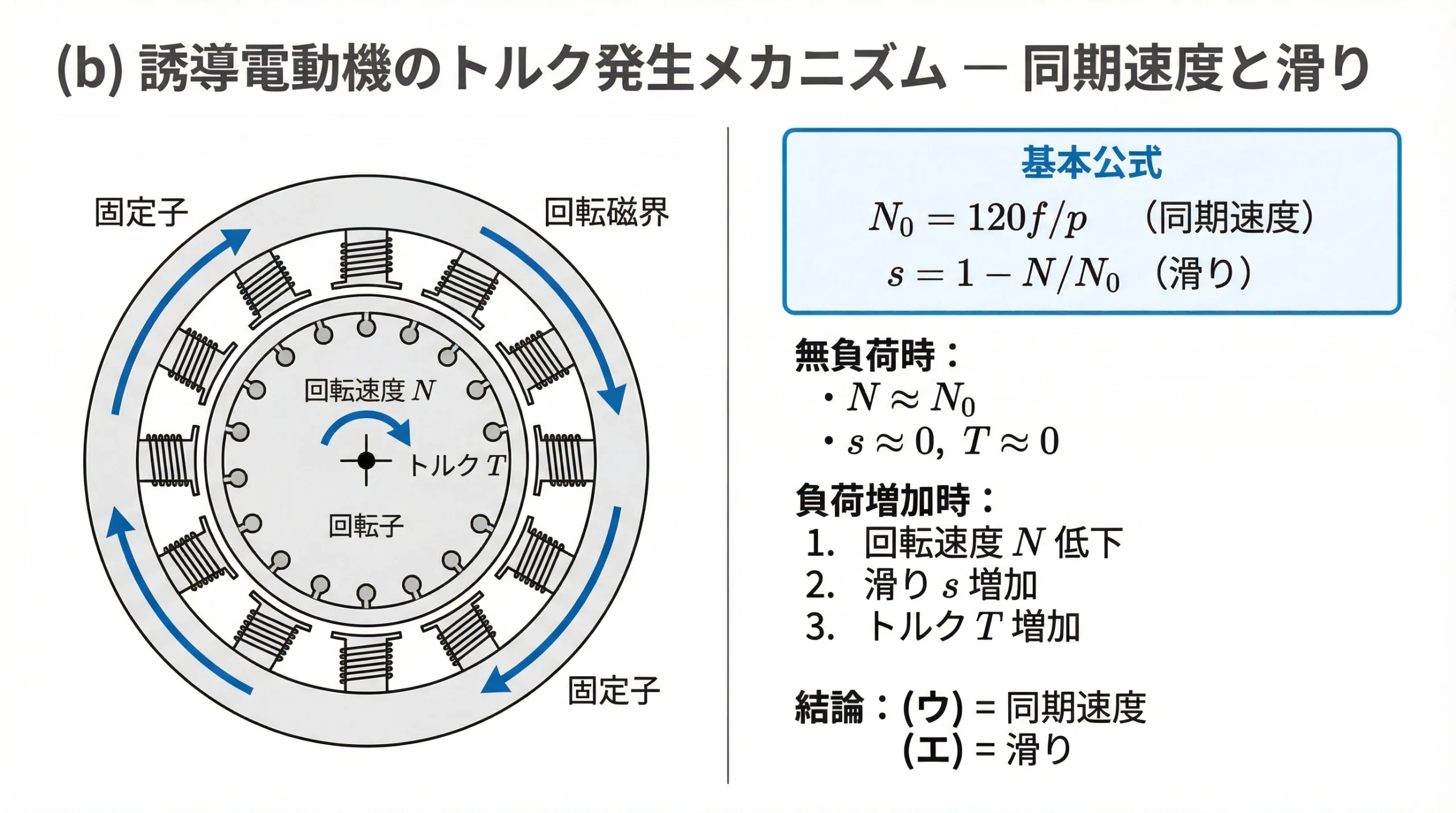
誘導電動機では、固定子の作る回転磁界の速度を同期速度(\(N_0\))と呼びます。
\[ N_0 = \frac{120f}{p} \quad \text{(同期速度)} \]
\[ s = 1 – \frac{N}{N_0} \quad \text{(滑り)} \]
無負荷時はほぼ同じ速度(\(N \approx N_0\))で回っています。このとき滑り(\(s\))はほぼゼロです。負荷がかかると回転速度 \(N\) が低下し、同期速度との差が開きます。つまり「滑り \(s\)」が増加します。誘導機では、この滑りが生じることで回転子に誘導電流が流れ、トルクが発生します。
結論:(ウ) = 同期速度、(エ) = 滑り
(b) 誘導電動機 — トルクと滑りの関係
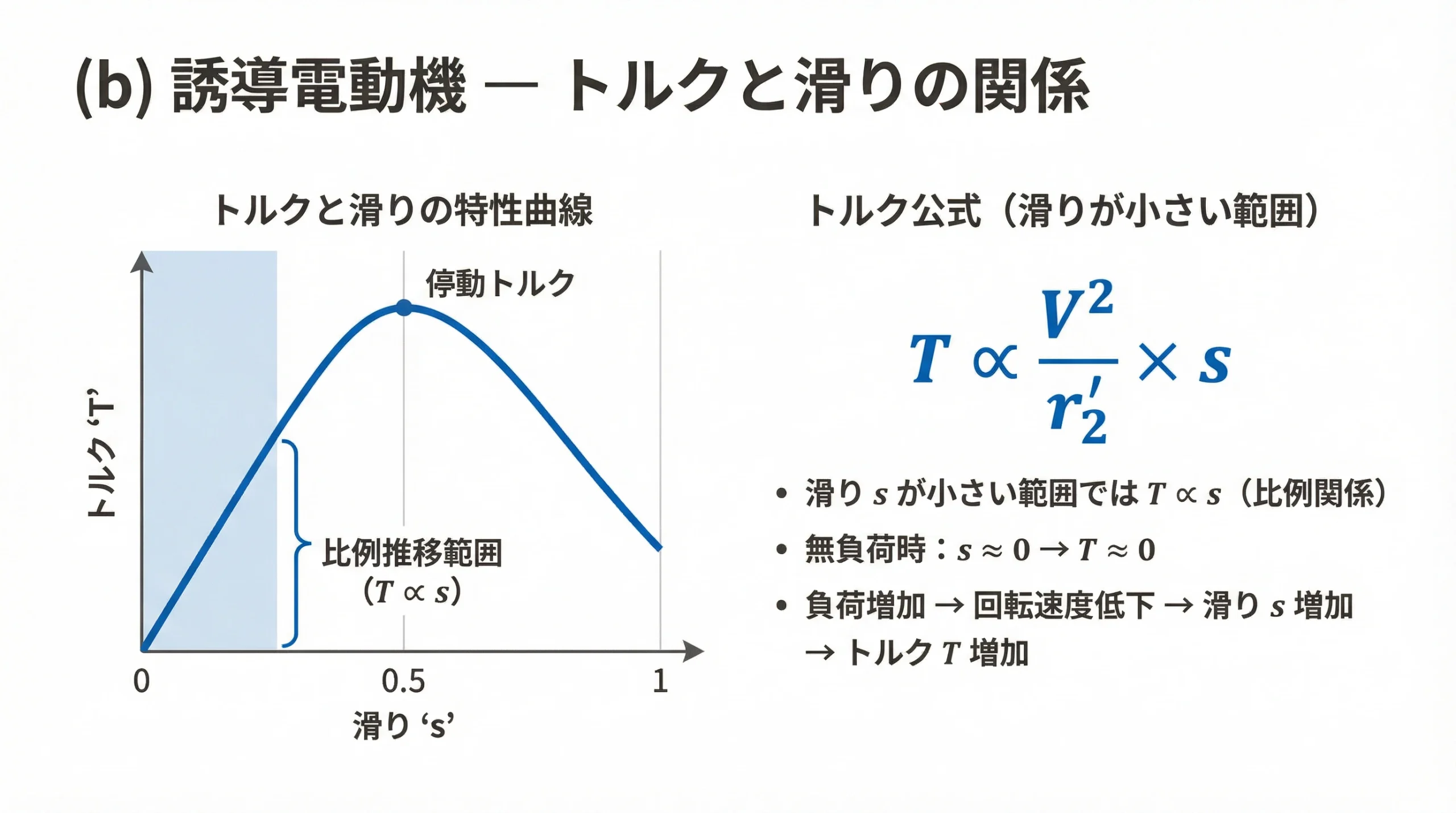
滑り \(s\) が小さい範囲(通常の運転範囲)では、トルク \(T\) は滑り \(s\) に比例します(比例推移)。
\[ T \approx \frac{30V^2}{\pi N_0 r_2′} s \]
負荷が増えて回転速度が下がると、滑りが増え、それに比例してトルクも大きくなります。誘導電動機は、負荷がかかって回転が遅くなる(滑りが増える)ほど、より強い力を出して回ろうとする性質を持っています。
(c) 同期電動機のトルク発生メカニズム — 負荷角
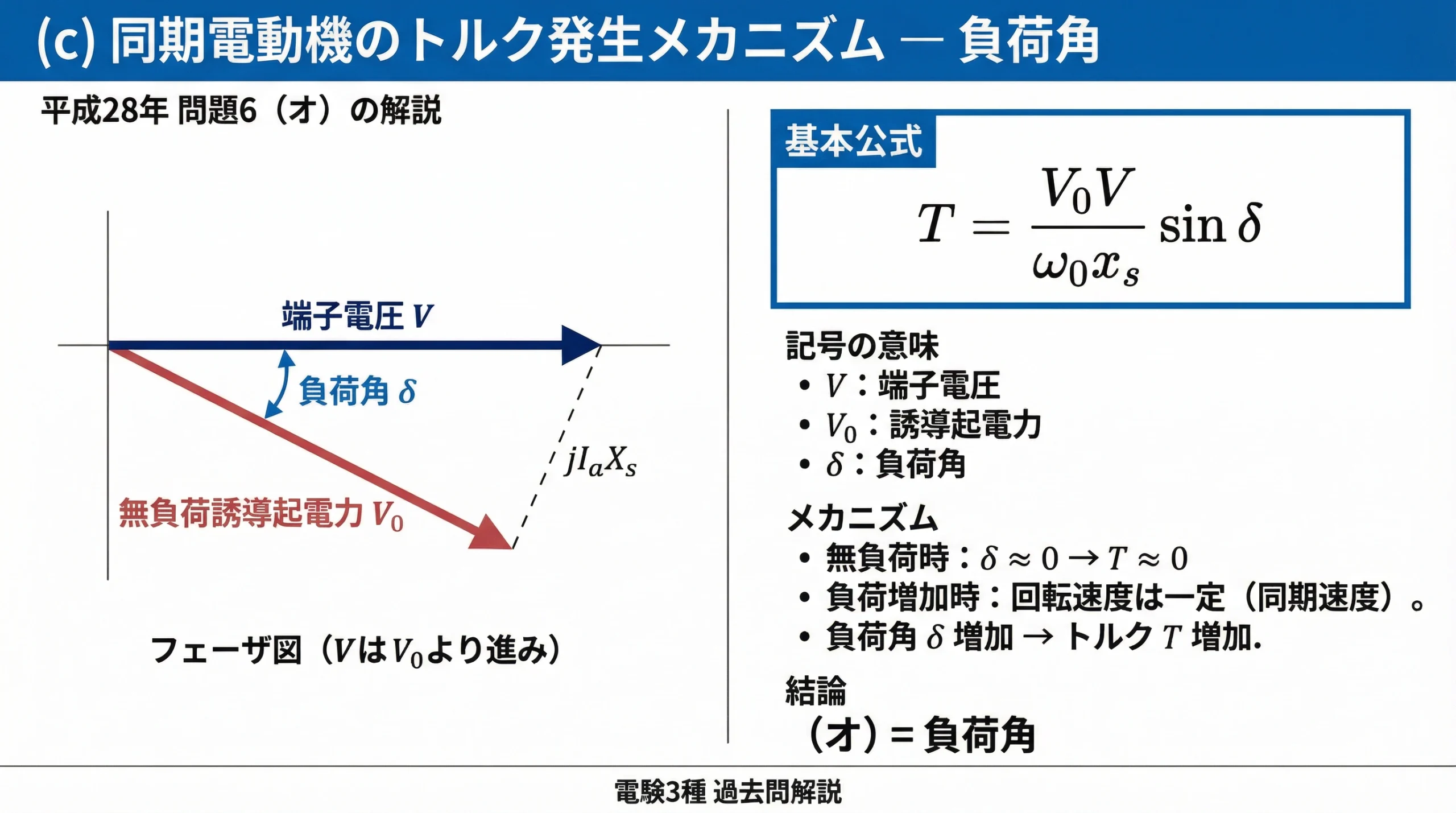
同期電動機の最大の特徴は、「負荷がかかっても回転速度が変わらない(同期速度のまま)」という点です。
\[ T = \frac{V_0 V}{\omega_0 x_s} \sin \delta \]
フェーザー図において、端子電圧 \(V\) と誘導起電力 \(V_0\) の間の角度が開く(位相差ができる)ことで、トルクが発生します。負荷がかかると角度(負荷角 \(\delta\))がつきますが、回転速度自体は同期速度を保ちます。
結論:(オ) = 負荷角
解答まとめ — 正解は(1)
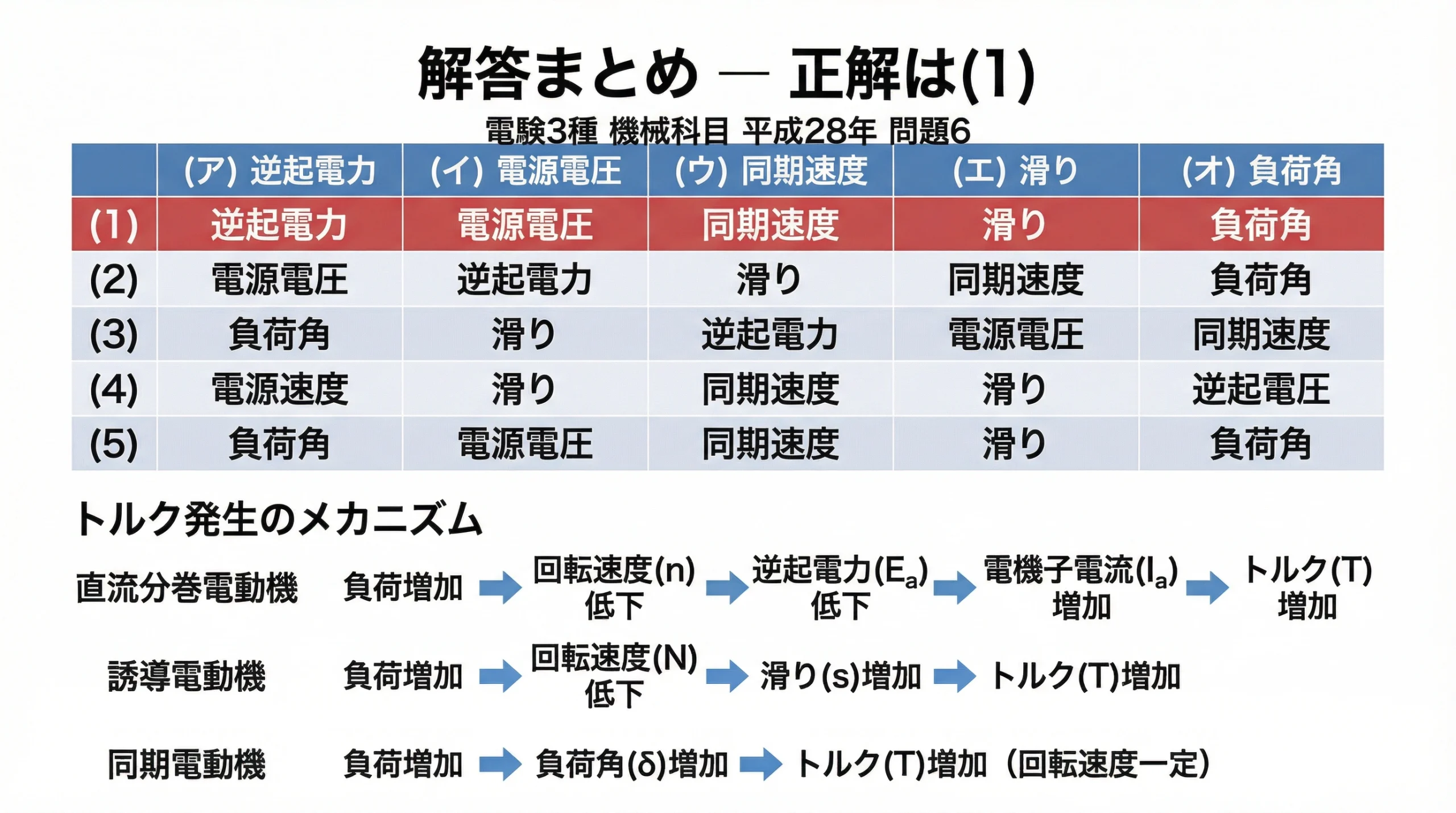
以上の分析から、正解は(1)となります。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
|---|---|---|---|---|---|
| (1) 正解 | 逆起電力 | 電源電圧 | 同期速度 | 滑り | 負荷角 |
重要ポイント&試験対策
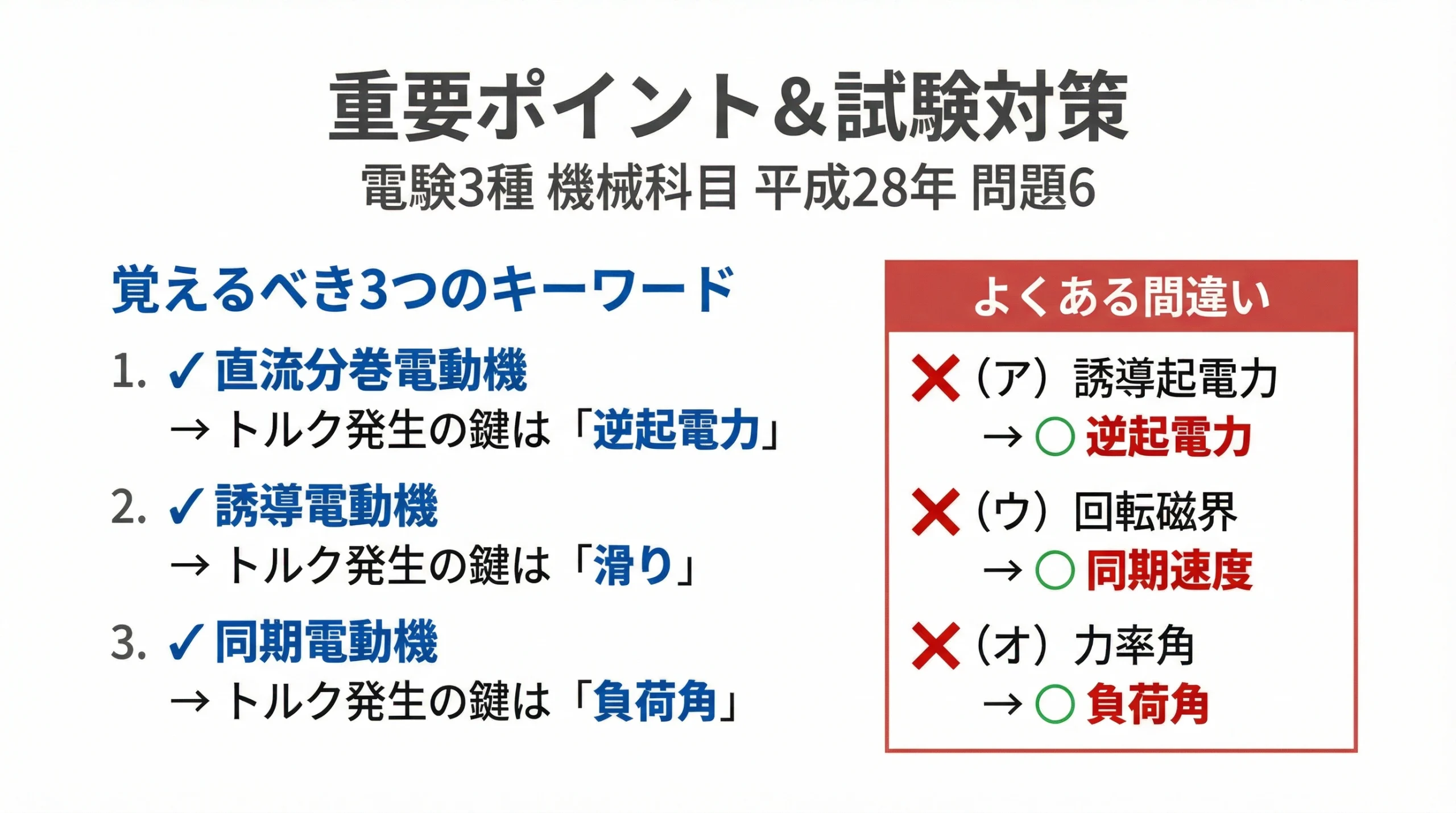
試験対策として、この3つのキーワードはセットで覚えておきましょう。
- 直流分巻電動機 → 逆起電力
- 誘導電動機 → 滑り
- 同期電動機 → 負荷角
特に同期電動機の「負荷角」は忘れがちなので注意が必要です。「力率角」は電圧と電流の位相差であり、トルク発生の直接的なパラメータ(磁束間の位相差)とは異なります。
まとめ — 各種回転機のトルク発生メカニズム
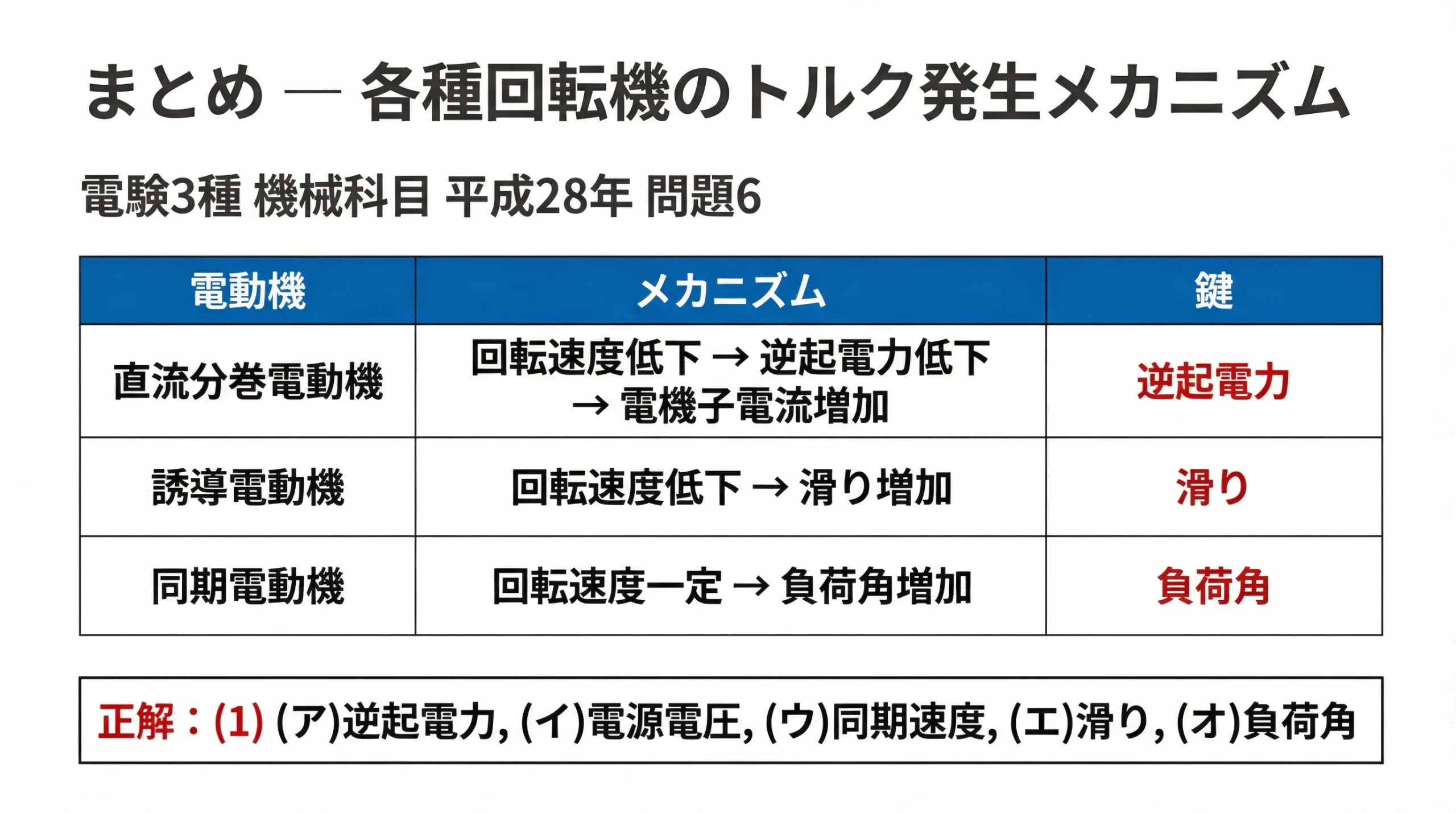
| 電動機 | メカニズム | 鍵となる物理量 |
|---|---|---|
| 直流分巻電動機 | 回転速度低下 → 逆起電力低下 → 電流増加 | 逆起電力 |
| 誘導電動機 | 回転速度低下 → 滑り増加 | 滑り |
| 同期電動機 | 回転速度一定 → 負荷角増加 | 負荷角 |
今回は平成28年 機械科目 問題6を通じて、各種回転機のトルク発生メカニズムを解説しました。この1問を理解するだけで、直流機・誘導機・同期機の基本的な特性を横断的に復習できます。ぜひ、それぞれの公式と物理的なイメージを結びつけて理解しておいてください。
コメント