電験3種の機械科目において、誘導電動機の速度制御は頻出かつ非常に重要なテーマです。本記事では、令和元年度(2019年度)の問4を取り上げ、かご形誘導電動機と巻線形誘導電動機のそれぞれの速度制御方式について、図解を交えながら視覚的にわかりやすく解説します。
【問題】電験3種 機械科目 令和元年度 問4
問題文の書き出し
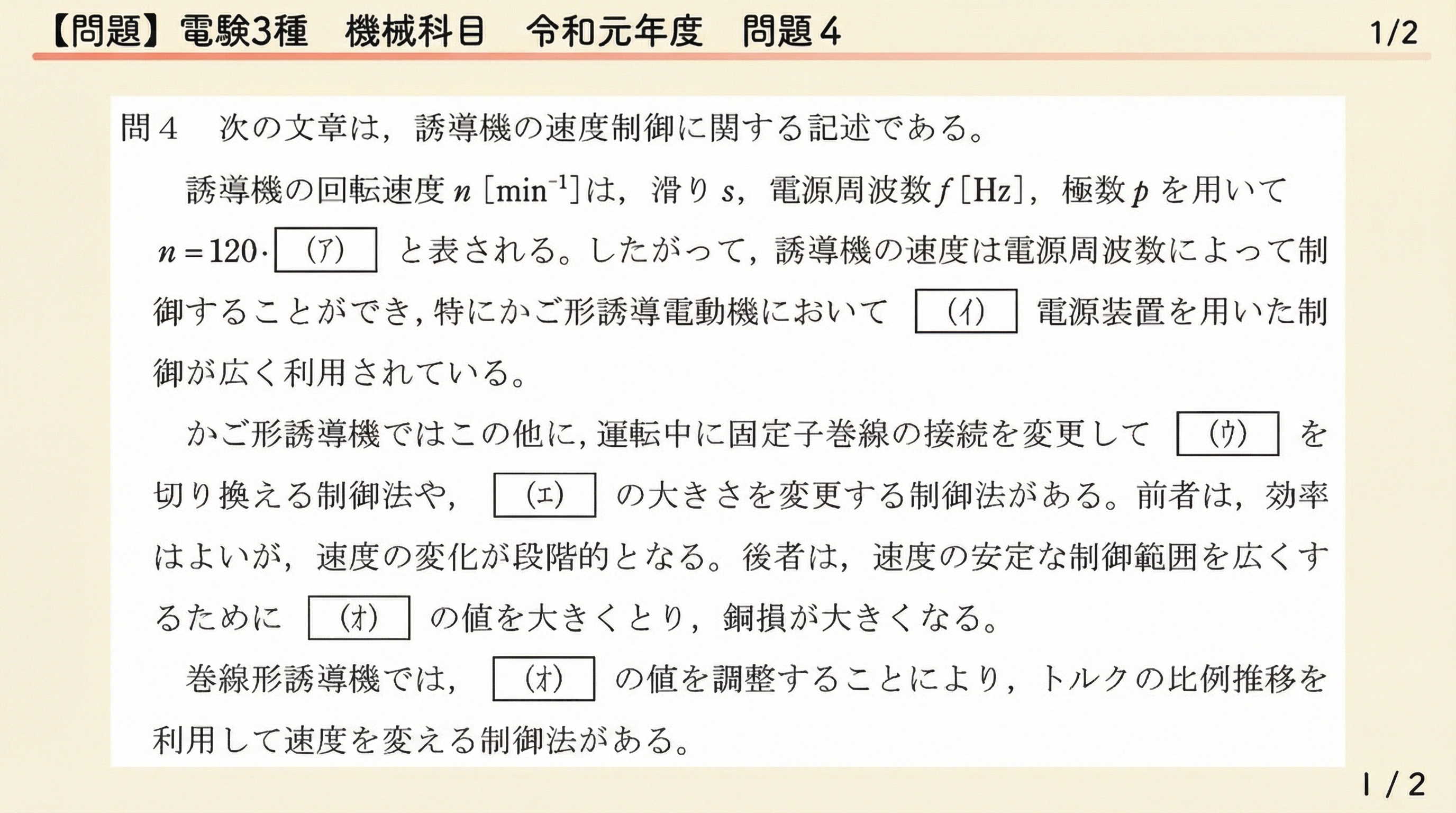
次の文章は,誘導機の速度制御に関する記述である。
誘導機の回転速度 \( n \, [\text{min}^{-1}] \) は,滑り \( s \),電源周波数 \( f \, [\text{Hz}] \),極数 \( p \) を用いて \( n = 120 \cdot \text{(ア)} \) と表される。したがって,誘導機の速度は電源周波数によって制御することができ,特にかご形誘導電動機において(イ)電源装置を用いた制御が広く利用されている。
かご形誘導機ではこの他に,運転中に固定子巻線の接続を変更して(ウ)を切り換える制御法や,(エ)の大きさを変更する制御法がある。前者は,効率はよいが,速度の変化が段階的となる。後者は,速度の安定な制御範囲を広くするために(オ)の値を大きくとり,銅損が大きくなる。
巻線形誘導機では,(オ)の値を調整することにより,トルクの比例推移を利用して速度を変える制御法がある。
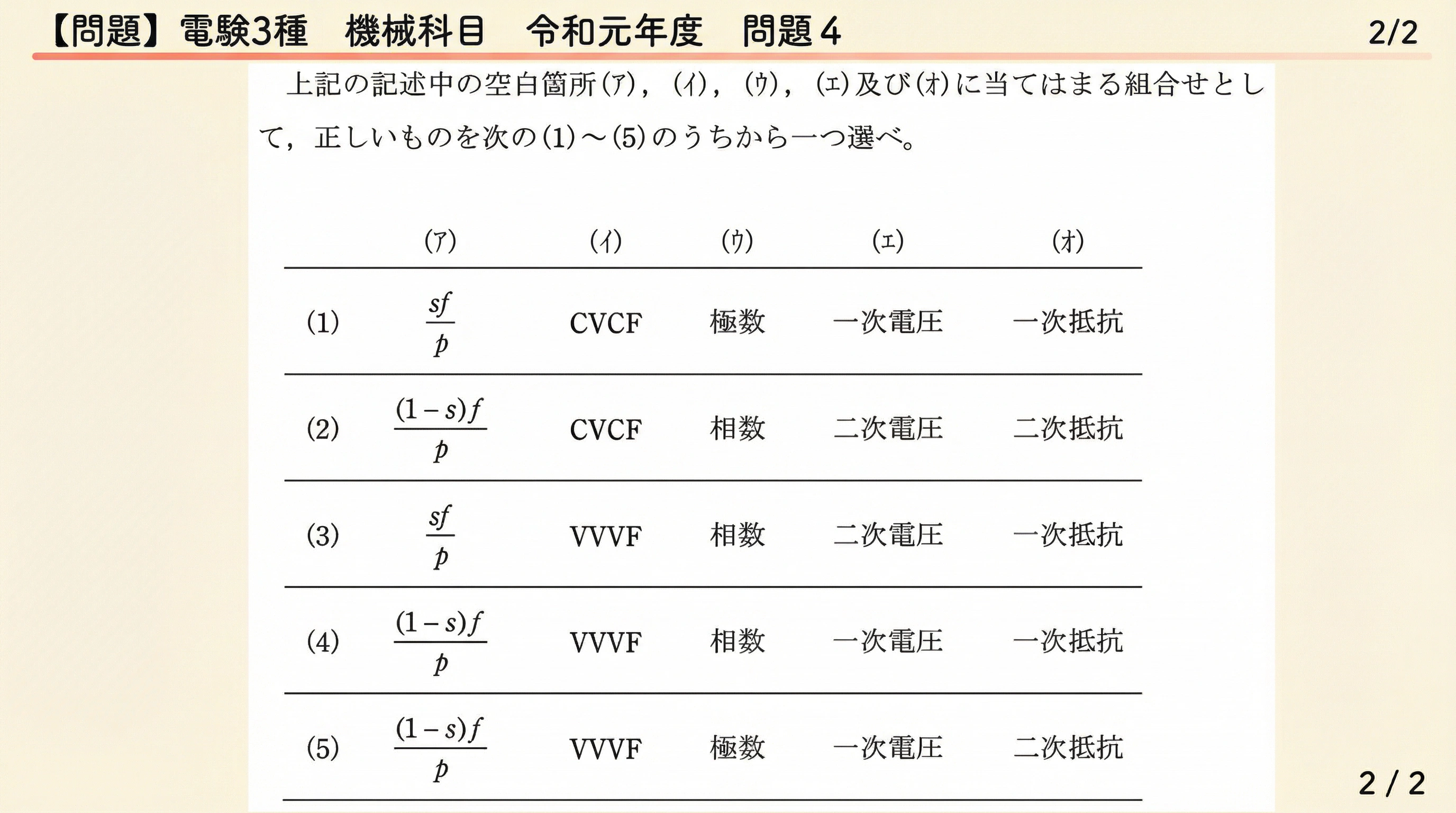
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる組合せとして,正しいものを次の(1)〜(5)のうちから一つ選べ。
選択肢
| 選択肢 | (ア) | (イ) | (ウ) | (エ) | (オ) |
|---|---|---|---|---|---|
| (1) | \( \frac{sf}{p} \) | CVCF | 極数 | 一次電圧 | 一次抵抗 |
| (2) | \( \frac{(1-s)f}{p} \) | CVCF | 相数 | 二次電圧 | 二次抵抗 |
| (3) | \( \frac{sf}{p} \) | VVVF | 相数 | 二次電圧 | 一次抵抗 |
| (4) | \( \frac{(1-s)f}{p} \) | VVVF | 相数 | 一次電圧 | 一次抵抗 |
| (5) | \( \frac{(1-s)f}{p} \) | VVVF | 極数 | 一次電圧 | 二次抵抗 |
問題の概要と条件整理:空欄(ア)〜(オ)を把握する
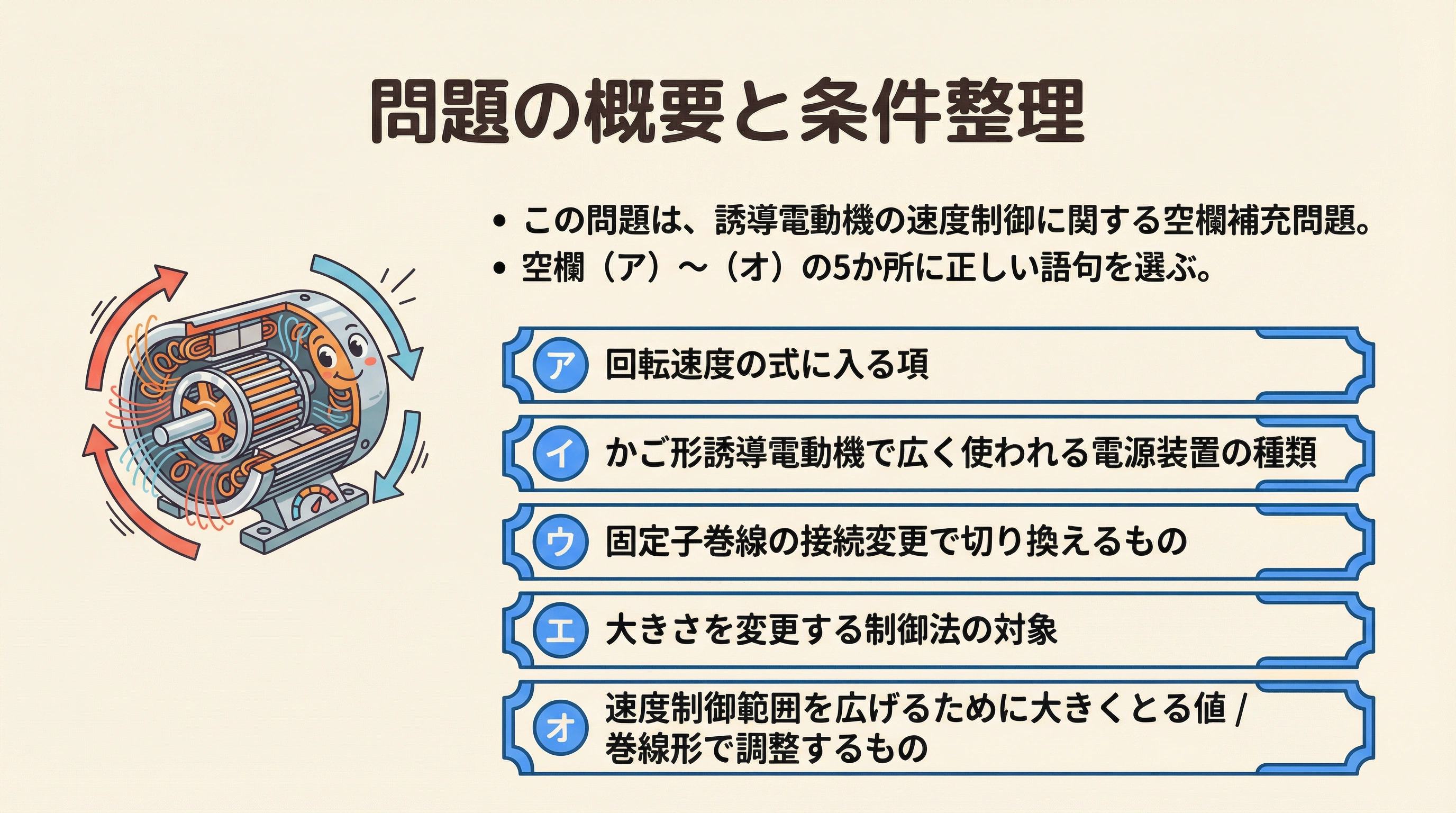
この問題は、誘導電動機の速度制御に関する知識を問う空欄補充問題です。空欄(ア)〜(オ)の5か所に正しい語句や数式を選びます。
- (ア):回転速度の式に入る項
- (イ):かご形誘導電動機で広く使われる電源装置の種類
- (ウ):固定子巻線の接続変更で切り換えるもの
- (エ):大きさを変更する制御法の対象
- (オ):速度制御範囲を広げるために大きくとる値 / 巻線形で調整するもの
誘導電動機の重要公式:回転速度の式を完全マスター
誘導電動機の問題を解く上で、絶対に覚えておかなければならない最重要公式が「回転速度の公式」です。
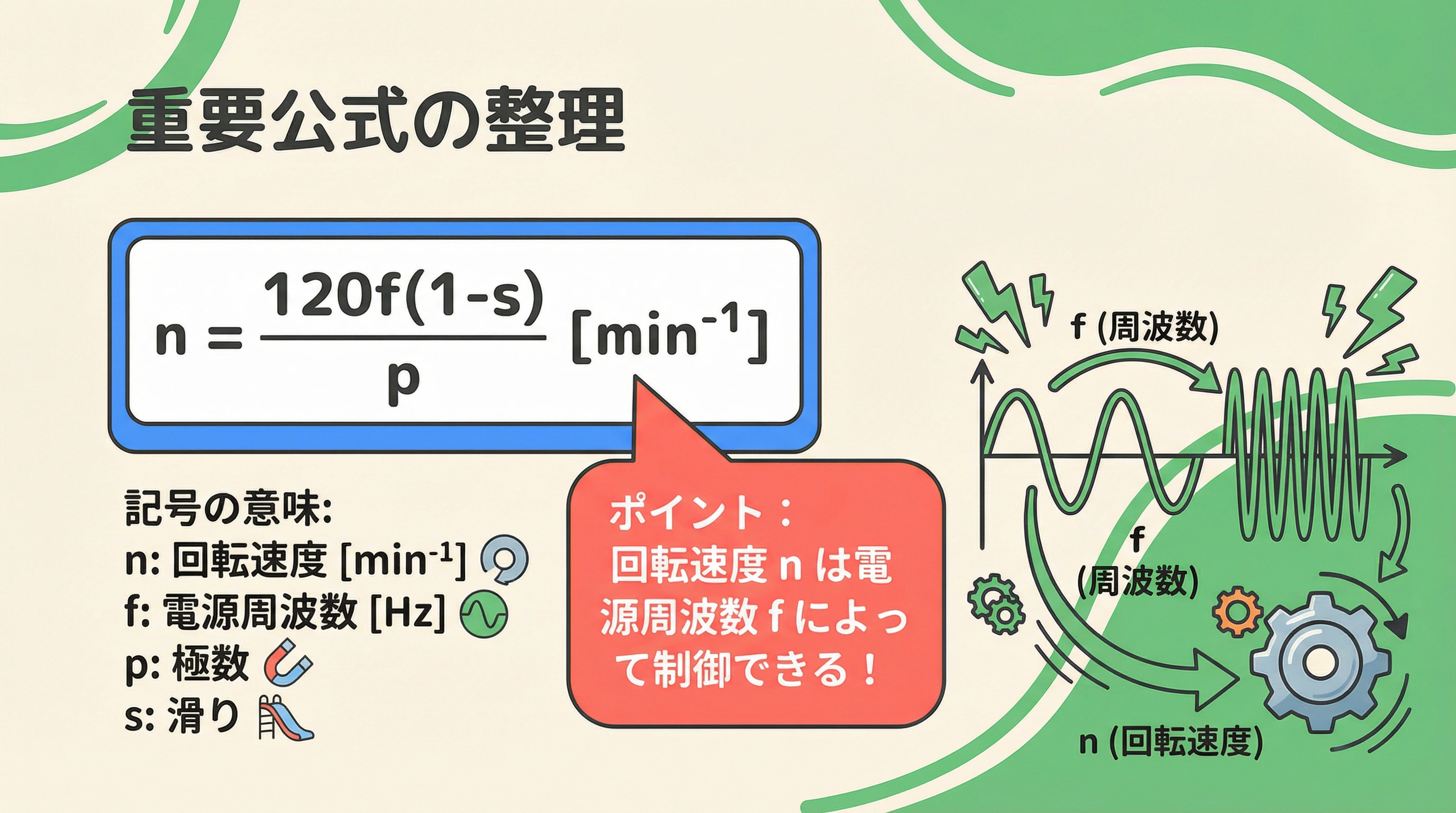
\[ n = \frac{120f(1-s)}{p} \quad [\text{min}^{-1}] \]記号の意味:
- \( n \):回転速度 \( [\text{min}^{-1}] \)
- \( f \):電源周波数 \( [\text{Hz}] \)
- \( p \):極数
- \( s \):滑り
この公式から、回転速度 \( n \) は「電源周波数 \( f \)」「極数 \( p \)」「滑り \( s \)」の3つの要素によって制御できることがわかります。これが速度制御の基本原理となります。
解説① 空欄(ア)の導出:回転速度の式を正しく理解する

まずは空欄(ア)について考えます。問題文には「\( n = 120 \cdot \text{(ア)} \)」とあります。
同期速度 \( n_0 \) の式は以下の通りです。
\[ n_0 = \frac{120f}{p} \]実際の回転速度 \( n \) は、同期速度から滑り \( s \) の分だけ遅れるため、次のように表されます。
\[ n = n_0(1-s) = \frac{120f(1-s)}{p} \]この式を問題文の形に変形すると、
\[ n = 120 \times \frac{(1-s)f}{p} \]となります。したがって、空欄(ア)には \( \frac{(1-s)f}{p} \) が入ります。
解説② 空欄(イ)・(ウ):VVVFインバータと極数切換による速度制御
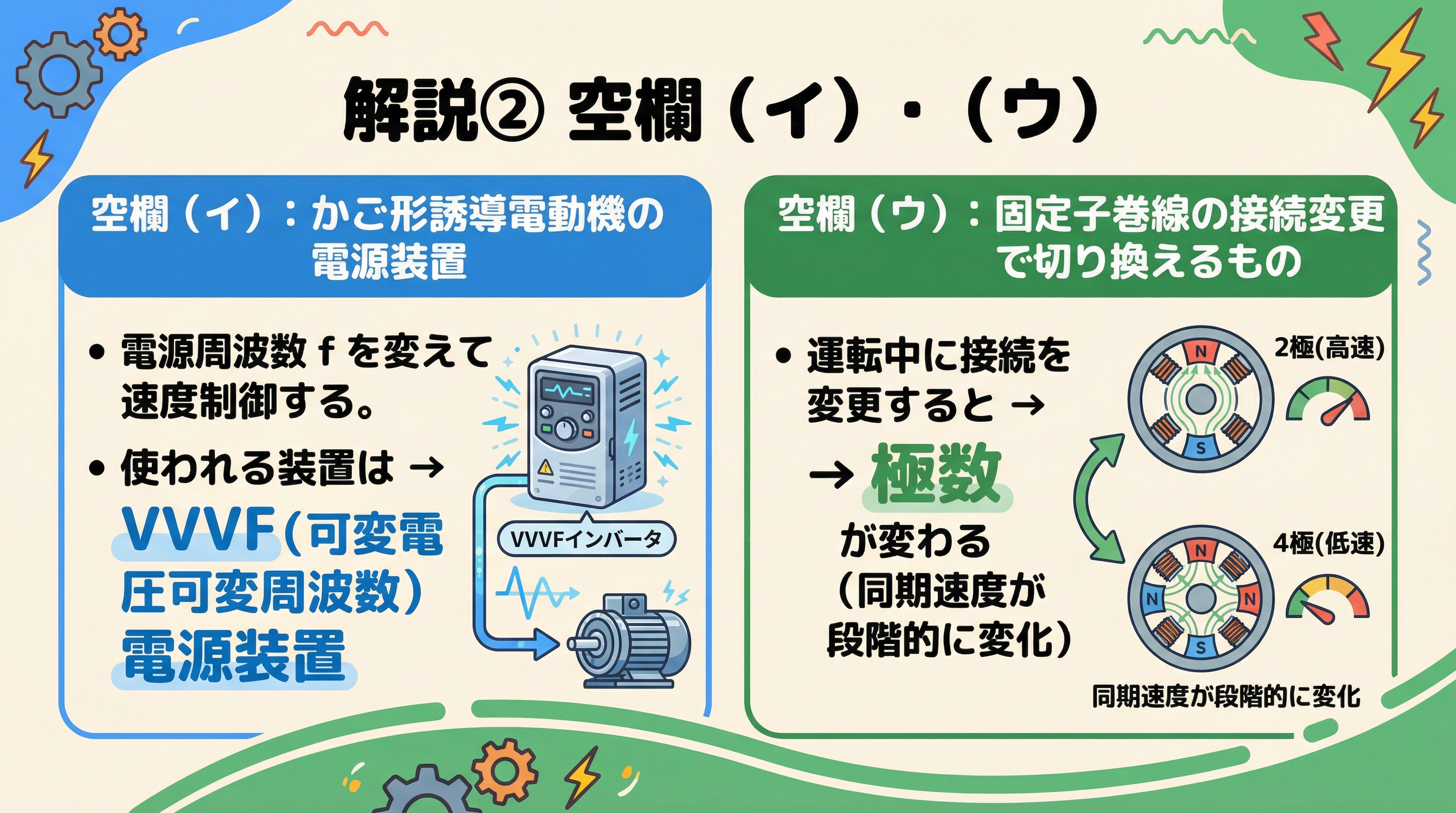
空欄(イ):かご形誘導電動機で広く使われる電源装置はVVVF
回転速度の公式の通り、電源周波数 \( f \) を変えることで速度を連続的に制御できます。この目的で現代の産業界で最も広く使われているのがVVVF(可変電圧可変周波数)インバータです。電圧と周波数を同時に変化させることで、広い速度範囲にわたって効率よく制御できます。
なお、CVCFは「定電圧定周波数(Constant Voltage Constant Frequency)」の略で、電圧・周波数を一定に保つ装置であり、速度制御には使用しません。したがって、空欄(イ)にはVVVFが入ります。
空欄(ウ):固定子巻線の接続変更で切り換えるのは極数
固定子巻線の接続(結線)を運転中に切り換えることで、モーターの極数を変更することができます。極数 \( p \) が変わると同期速度が変化します。例えば、2極(高速)から4極(低速)へ切り換えるといった具合です。この方法は効率は良いですが、速度の変化が「段階的(連続的ではない)」になるという特徴があります。したがって、空欄(ウ)には極数が入ります。
解説③ 空欄(エ)・(オ):一次電圧制御と二次抵抗制御の仕組み
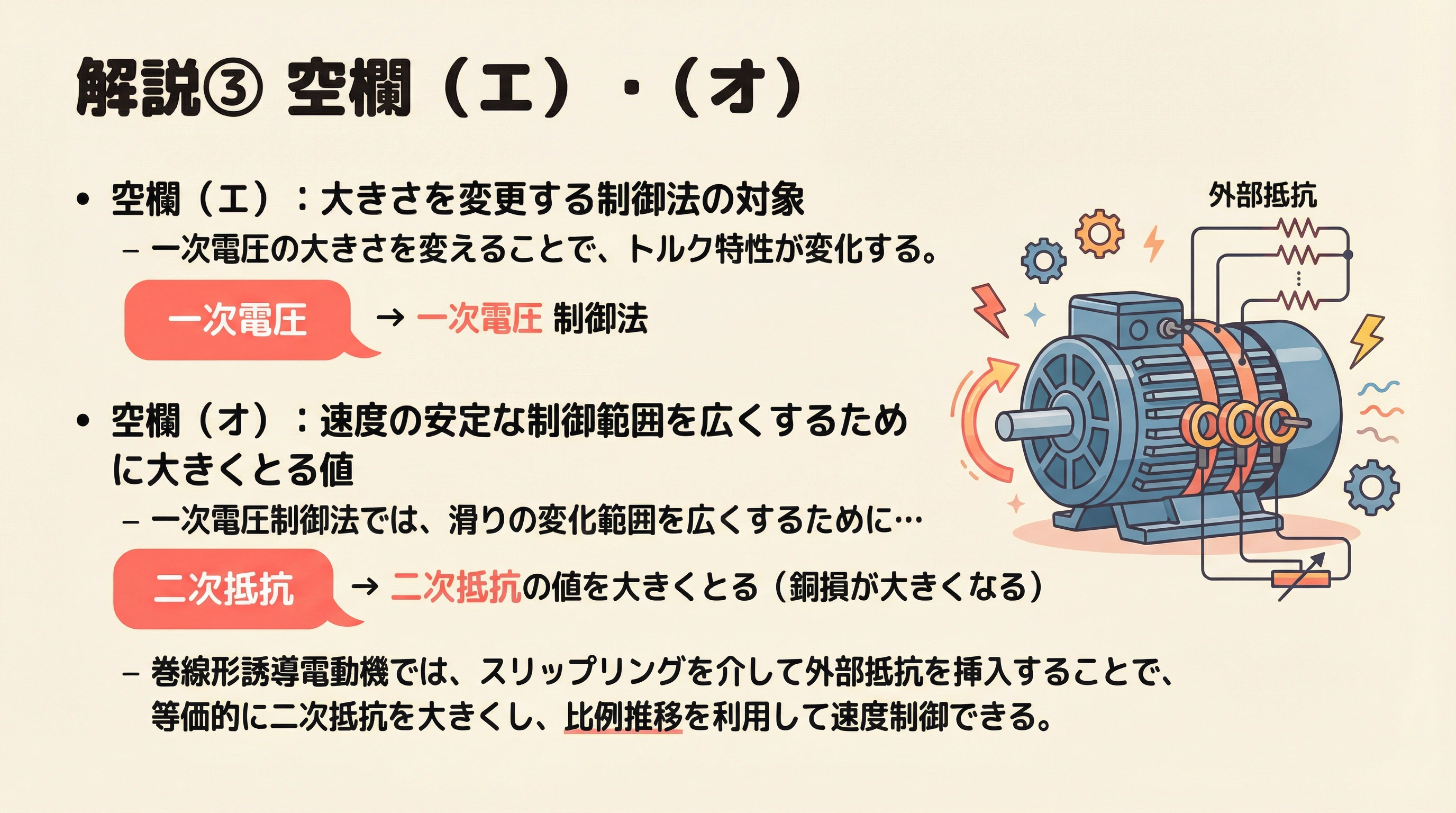
空欄(エ):大きさを変更する制御法の対象は一次電圧
かご形誘導電動機のもう一つの制御法として、一次電圧の大きさを変える方法があります。一次電圧を下げるとトルクが減少し、負荷との釣り合い点が移動するため、結果として滑りが大きくなり速度が下がります。したがって、空欄(エ)には一次電圧が入ります。
空欄(オ):速度制御範囲を広げるために大きくとる値は二次抵抗
一次電圧制御法において、速度の安定な制御範囲を広くするためには、トルクの最大値が発生する滑りを大きくする必要があります。そのためには二次抵抗の値を大きくとるように設計されます(ただし、二次銅損が大きくなり効率は悪化します)。
また、巻線形誘導電動機に特有の制御法として、スリップリングを介して外部抵抗を挿入し、等価的に二次抵抗を大きくすることで速度を制御する方法があります。これを「比例推移」を利用した速度制御と呼びます。したがって、空欄(オ)には二次抵抗が入ります。
解答まとめ:正解は選択肢(5)
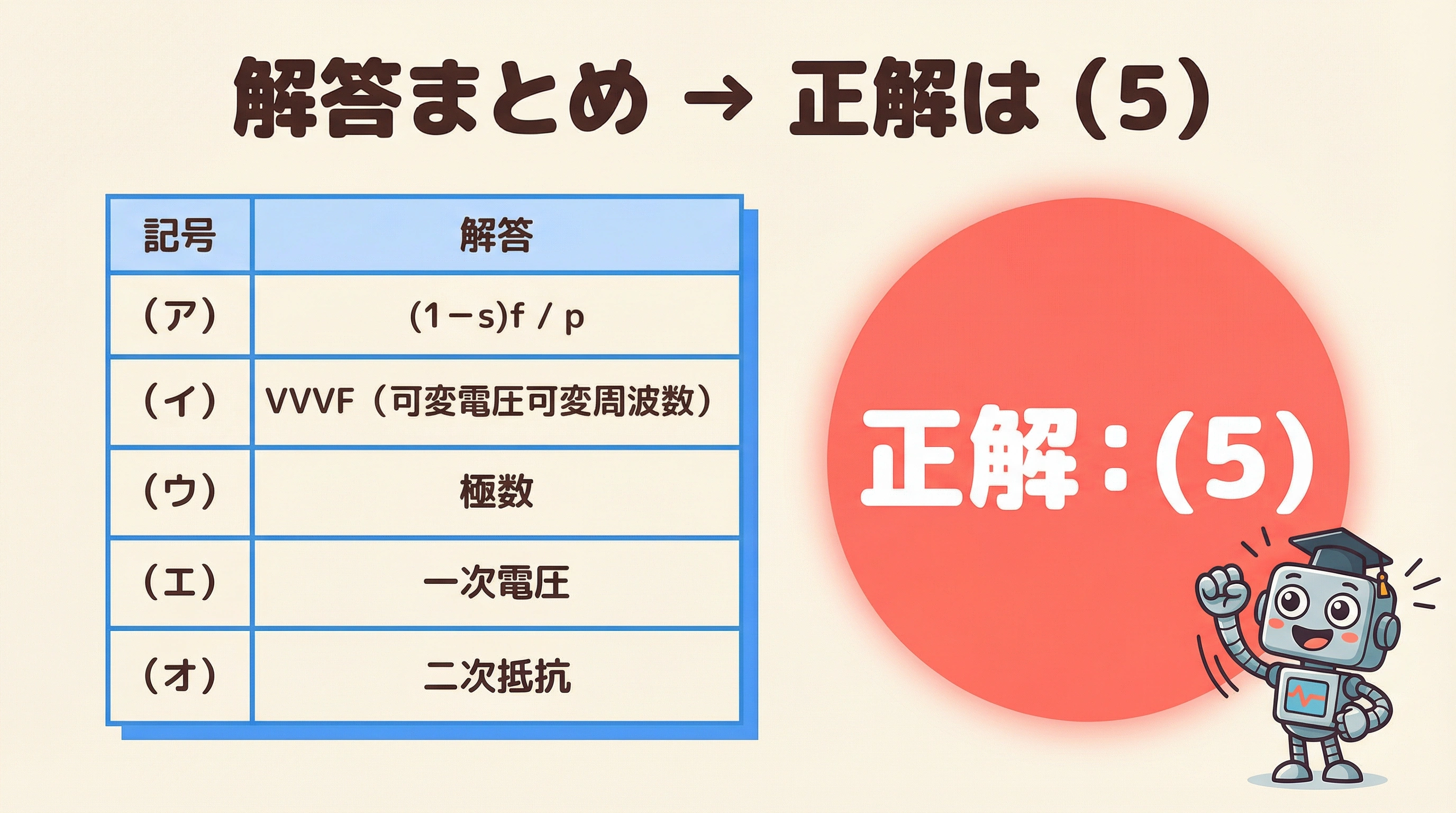
これまでの考察をまとめると、以下のようになります。
| 空欄 | 解答 |
|---|---|
| (ア) | \( \frac{(1-s)f}{p} \) |
| (イ) | VVVF(可変電圧可変周波数) |
| (ウ) | 極数 |
| (エ) | 一次電圧 |
| (オ) | 二次抵抗 |
この組み合わせに該当するのは、選択肢の(5)となります。
重要ポイントと試験対策:誘導電動機の速度制御を完全マスター
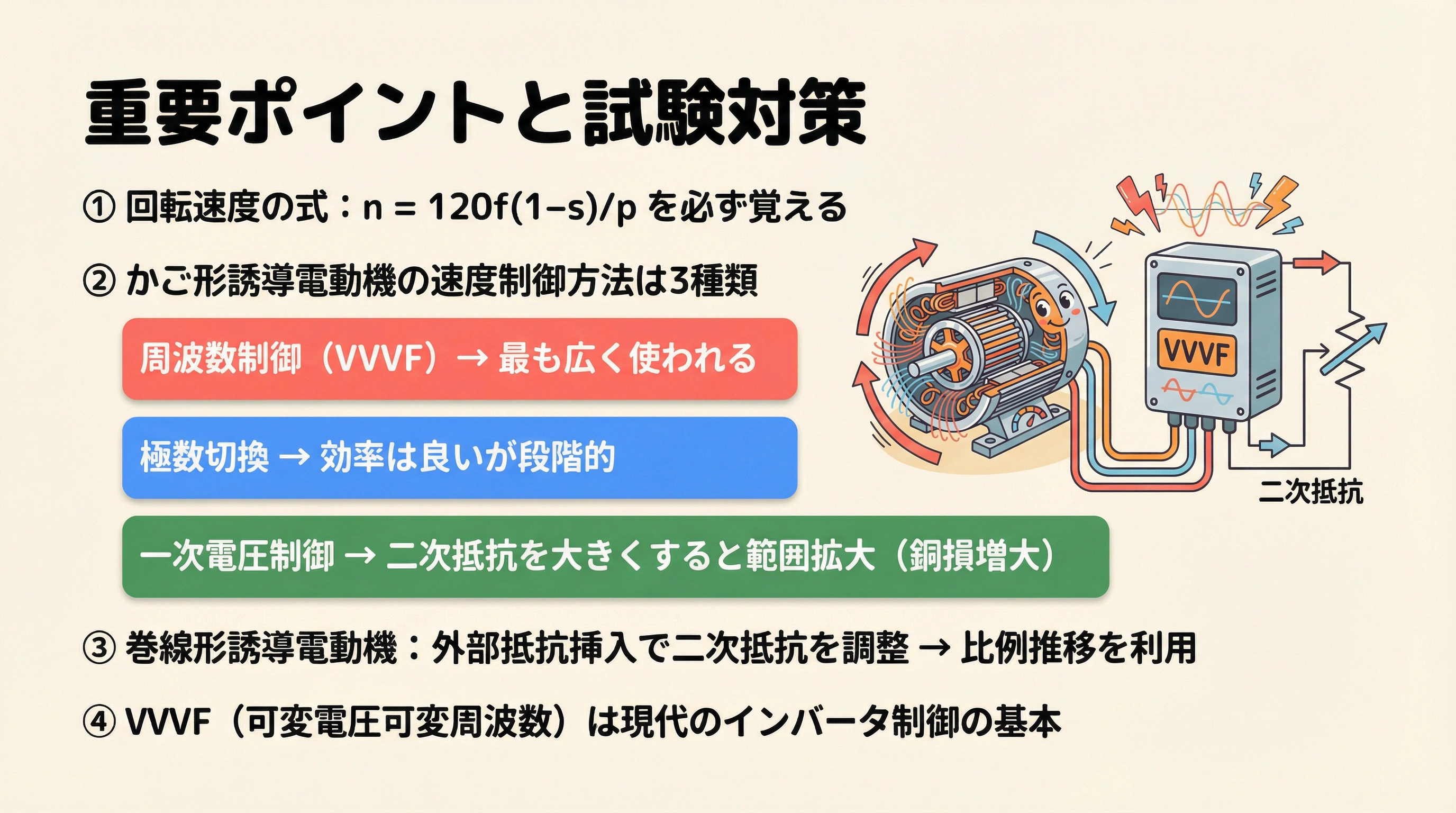
① 回転速度の公式は絶対暗記
\[ n = \frac{120f(1-s)}{p} \quad [\text{min}^{-1}] \]この公式は、誘導電動機のあらゆる計算問題・論説問題の基礎となります。\( f \)・\( p \)・\( s \) のどれを変えるかが、速度制御方式の違いに直結します。
② かご形誘導電動機の速度制御3方式を比較する
| 制御方式 | 変化させるパラメータ | 特徴 |
|---|---|---|
| 周波数制御(VVVF) | 電源周波数 \( f \) | 連続的・高効率。現在最も主流。 |
| 極数切換 | 極数 \( p \) | 効率は良いが、速度変化が段階的。 |
| 一次電圧制御 | 滑り \( s \)(間接的) | 二次抵抗を大きく設計する必要があり、銅損が増加(効率低下)。 |
③ 巻線形誘導電動機の二次抵抗制御と比例推移
巻線形誘導電動機では、スリップリングを介して外部抵抗を挿入し、等価的に二次抵抗を大きくすることで速度を制御します。これを「比例推移」を利用した速度制御と呼びます。トルク特性曲線の形状を相似的に変化させることができるのが特徴です。
これらの特徴をしっかりと理解し、それぞれの制御法が「どのパラメータ(\( f, p, s \))を変化させているのか」を公式と結びつけて覚えることが合格への近道です。
コメント