
電験3種の機械科目において、「誘導電動機の制御」は非常に頻出のテーマです。特に、インバータを用いた速度制御や、滑りの正負の考え方、そして最新のベクトル制御に関する知識は、多くの受験生が苦手意識を持ちやすい部分でもあります。
「滑り周波数制御って結局どういう仕組み?」
「回生制動のとき、滑りはプラスになるの?マイナスになるの?」
「ベクトル制御とスカラ制御の違いがよくわからない…」
このようなお悩みをお持ちではないでしょうか?
この記事では、平成21年度 機械科目 問6の過去問を題材に、誘導電動機の始動からインバータ制御、ベクトル制御に至るまで、スライド図解を交えながら丁寧に解説します。この記事を読めば、誘導電動機の制御に関する基礎知識がしっかりと身につき、類似問題にも自信を持って解答できるようになります。
1. 電験3種 機械科目 平成21年度 問6 問題文と選択肢
まずは、実際に出題された問題文を確認してみましょう。
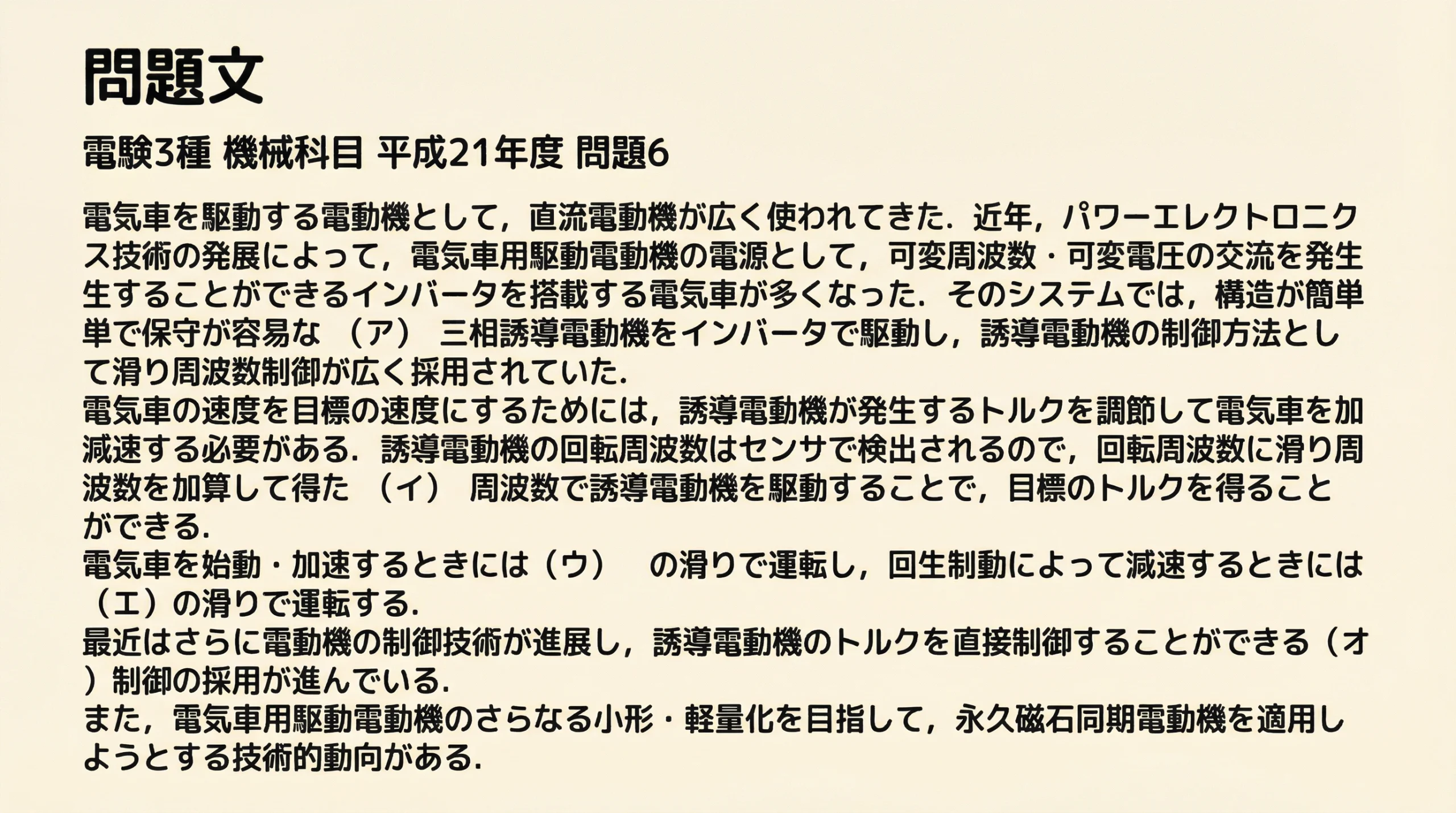
問題文(電験3種 機械科目 平成21年度 問題6)
電気車を駆動する電動機として,直流電動機が広く使われてきた.近年,パワーエレクトロニクス技術の発展によって,電気車用駆動電動機の電源として,可変周波数・可変電圧の交流を発生することができるインバータを搭載する電気車が多くなった.そのシステムでは,構造が簡単で保守が容易な (ア) 三相誘導電動機をインバータで駆動し,誘導電動機の制御方法として滑り周波数制御が広く採用されていた.電気車の速度を目標の速度にするためには,誘導電動機が発生するトルクを調節して電気車を加減速する必要がある.誘導電動機の回転周波数はセンサで検出されるので,回転周波数に滑り周波数を加算して得た (イ) 周波数で誘導電動機を駆動することで,目標のトルクを得ることができる.電気車を始動・加速するときには (ウ) の滑りで運転し,回生制動によって減速するときには (エ) の滑りで運転する.最近はさらに電動機の制御技術が進展し,誘導電動機のトルクを直接制御することができる (オ) 制御の採用が進んでいる.また,電気車用駆動電動機のさらなる小形・軽量化を目指して,永久磁石同期電動機を適用しようとする技術的動向がある.
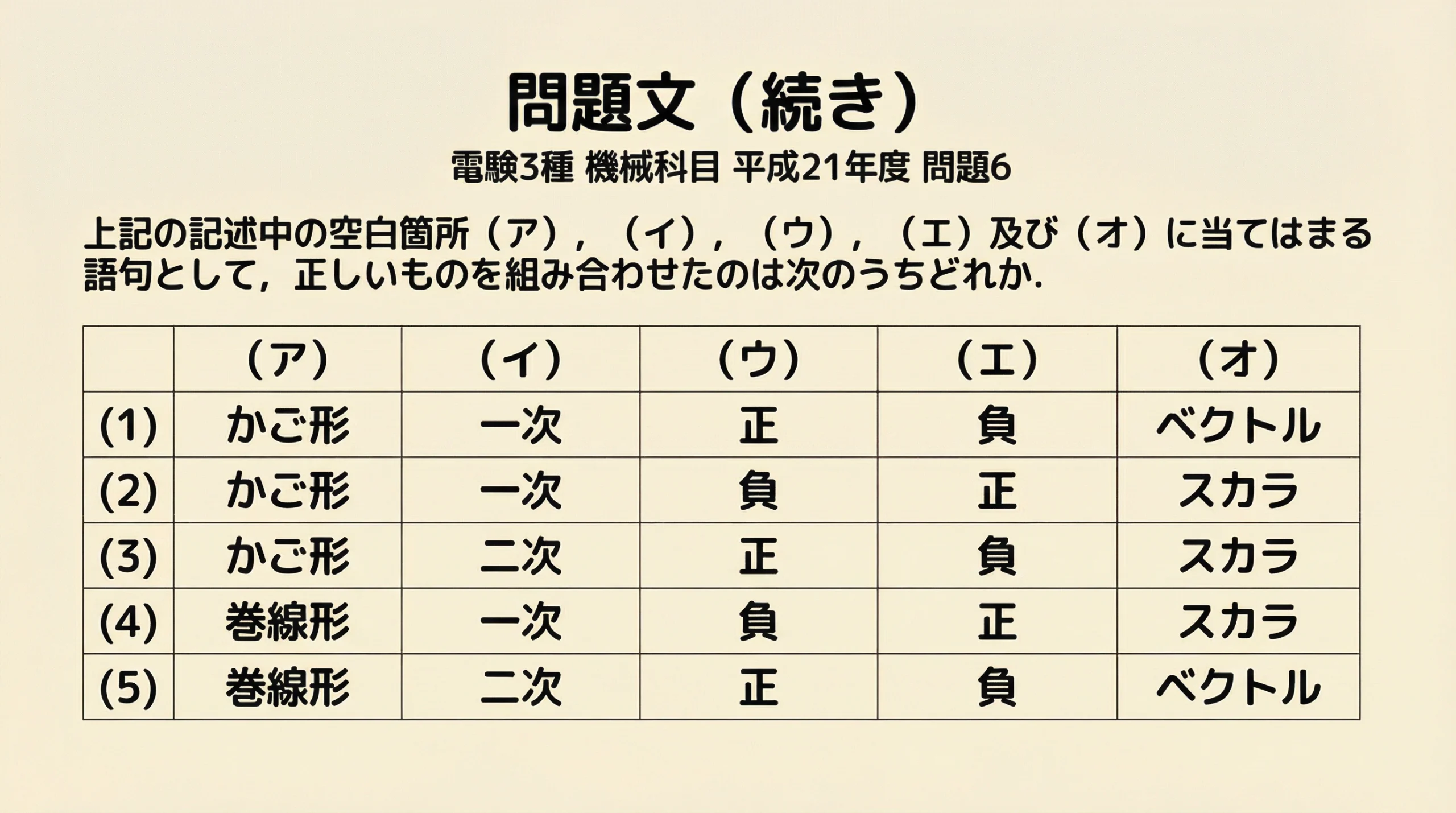
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる語句として,正しいものを組み合わせたのは次のうちどれか.
選択肢
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
|---|---|---|---|---|---|
| (1) | かご形 | 一次 | 正 | 負 | ベクトル |
| (2) | かご形 | 一次 | 負 | 正 | スカラ |
| (3) | かご形 | 二次 | 正 | 負 | スカラ |
| (4) | 巻線形 | 一次 | 負 | 正 | スカラ |
| (5) | 巻線形 | 二次 | 正 | 負 | ベクトル |
2. この問題のポイントと全体像
この問題では、誘導電動機のインバータ制御に関する総合的な知識が問われています。5つの空欄で問われているキーワードを整理しましょう。
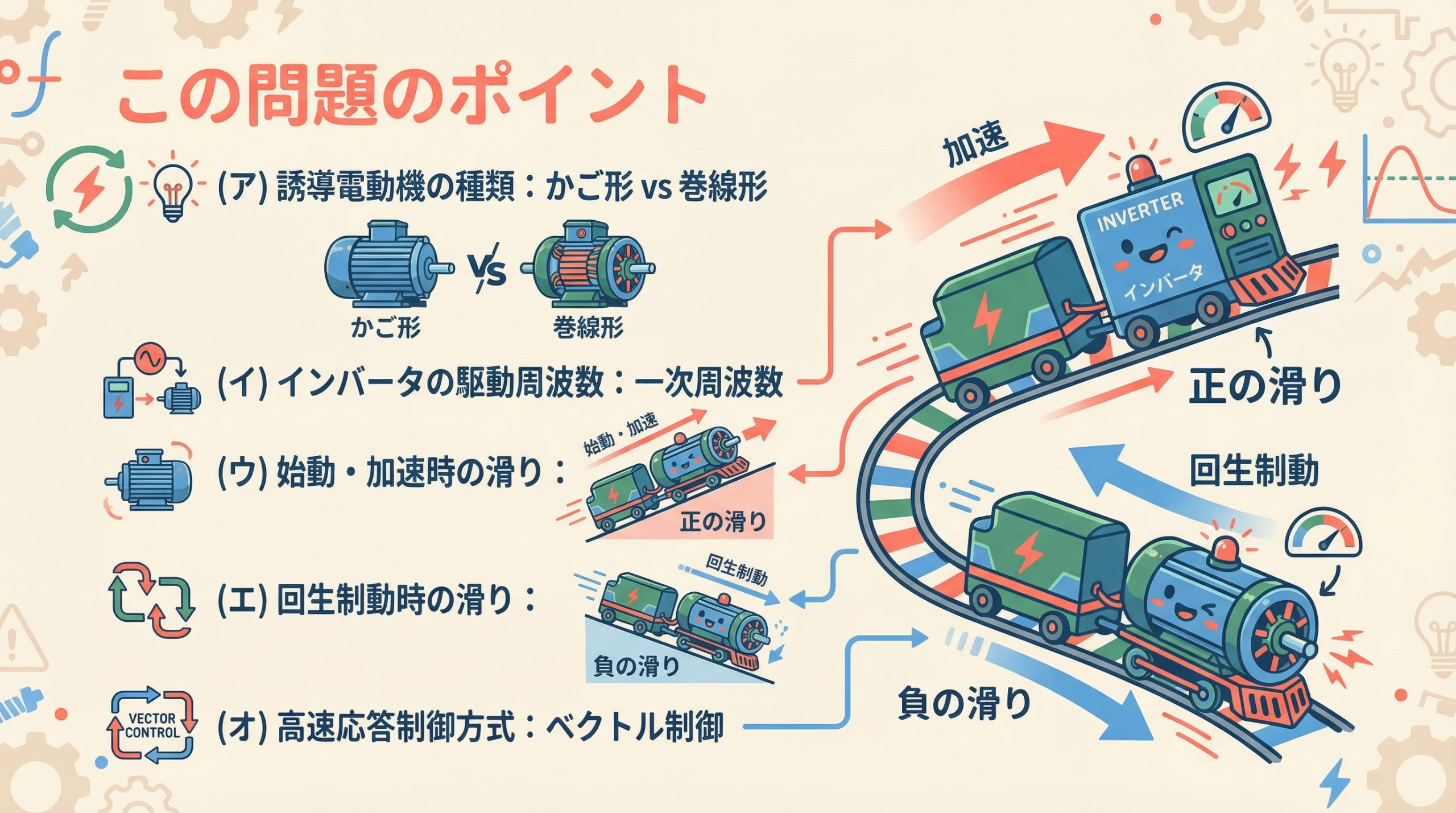
- (ア)誘導電動機の種類:かご形 vs 巻線形
- (イ)インバータの駆動周波数:一次周波数
- (ウ)始動・加速時の滑り:正の滑り
- (エ)回生制動時の滑り:負の滑り
- (オ)高速応答制御方式:ベクトル制御
それぞれの項目について、順番に詳しく解説していきます。
3. (ア)の解説:かご形誘導電動機と巻線形の違い
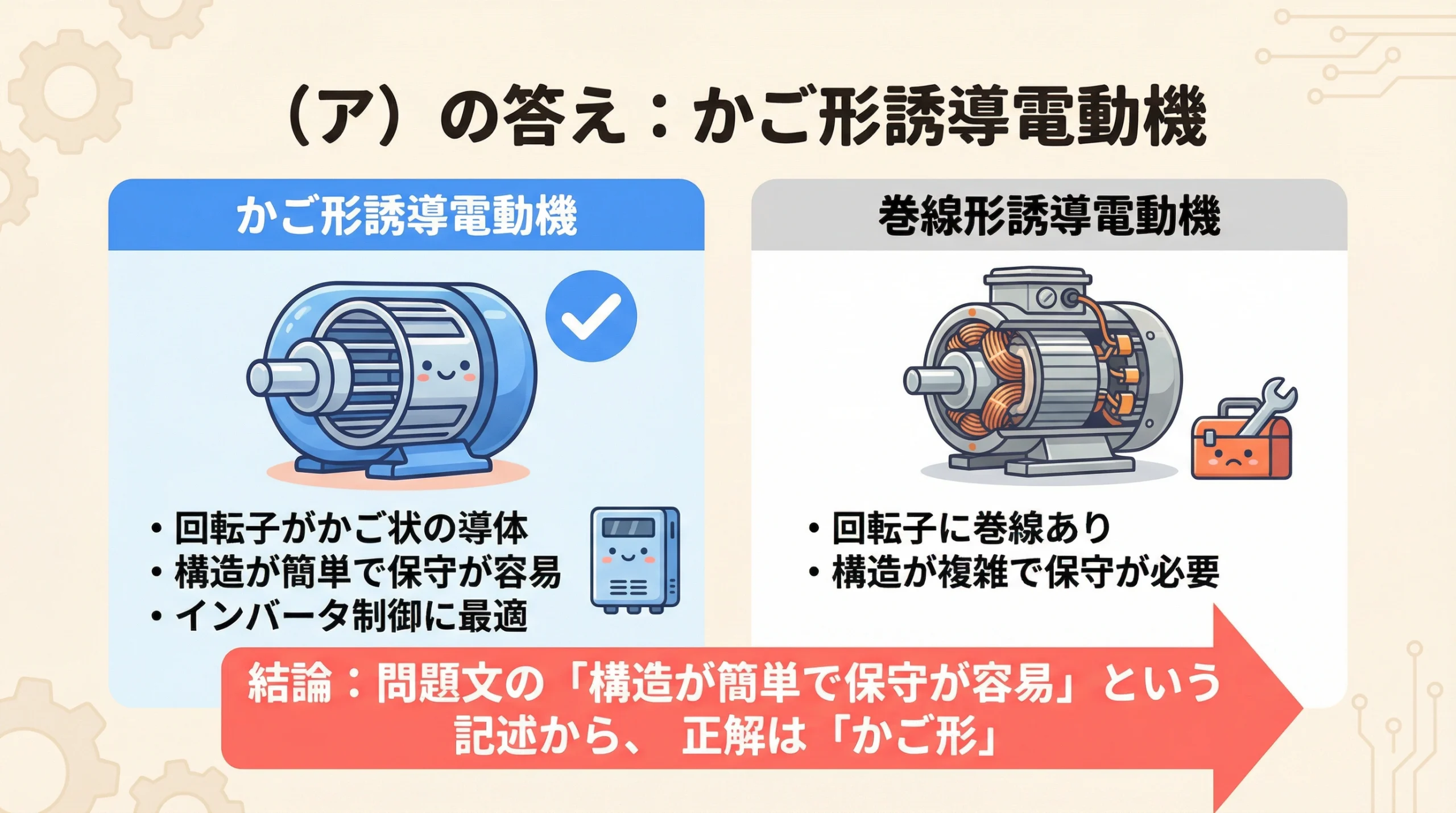
問題文には「構造が簡単で保守が容易な」と記述されています。これが最大のヒントです。
誘導電動機には、主に「かご形」と「巻線形」の2種類があります。
- かご形誘導電動機:回転子がかご状の導体で構成されています。スリップリングやブラシといった摺動部(こすれ合う部分)がないため、構造が非常に簡単で頑丈であり、保守(メンテナンス)が容易です。インバータ制御との相性が良く、電気車(電車)などで広く採用されています。
- 巻線形誘導電動機:回転子に巻線が施されており、外部抵抗を接続して始動特性を改善することができます(比例推移)。しかし、スリップリングやブラシが必要なため、構造が複雑になり、定期的な保守が不可欠です。
したがって、問題文の記述に合致するのは「かご形」となります。
4. (イ)の解説:滑り周波数制御と一次周波数の関係
次に、インバータによる「滑り周波数制御」の仕組みについて考えます。
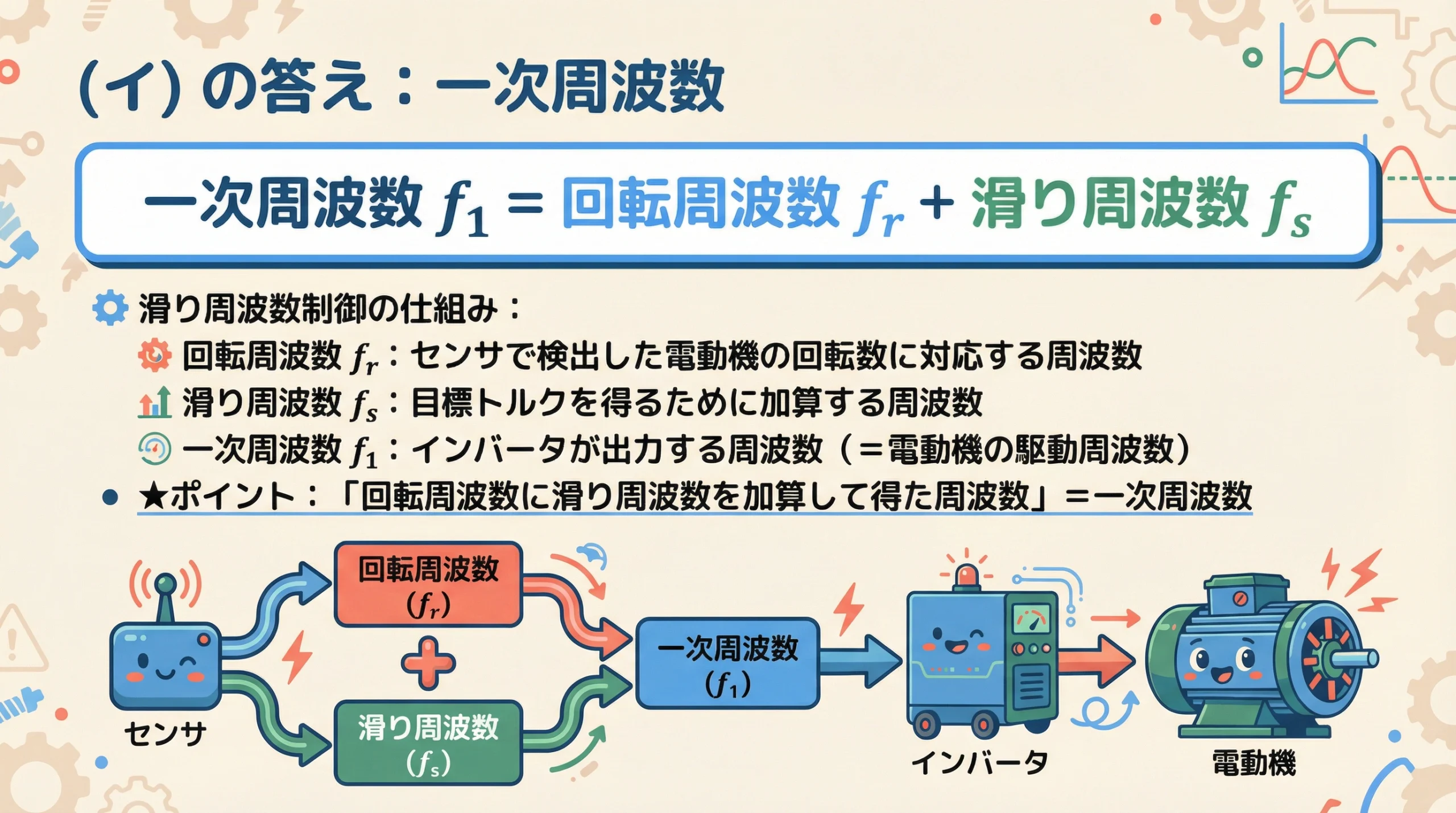
滑り周波数制御では、電動機から必要なトルクを引き出すために、以下の関係式を用いてインバータの出力周波数を決定します。
$$ f_1 = f_r + f_s $$
- \( f_r \) :回転周波数(センサで検出した実際のモーターの回転速度に対応する周波数)
- \( f_s \) :滑り周波数(目標とするトルクを得るために加算する周波数)
- \( f_1 \) :一次周波数(インバータが出力し、電動機の固定子に印加する駆動周波数)
問題文には「回転周波数に滑り周波数を加算して得た(イ)周波数で誘導電動機を駆動する」とあります。電動機を駆動するために外部(インバータ)から与える周波数は、固定子側の周波数である「一次周波数」です。
5. (ウ)(エ)の解説:電動機動作と発電機動作における滑りの正負
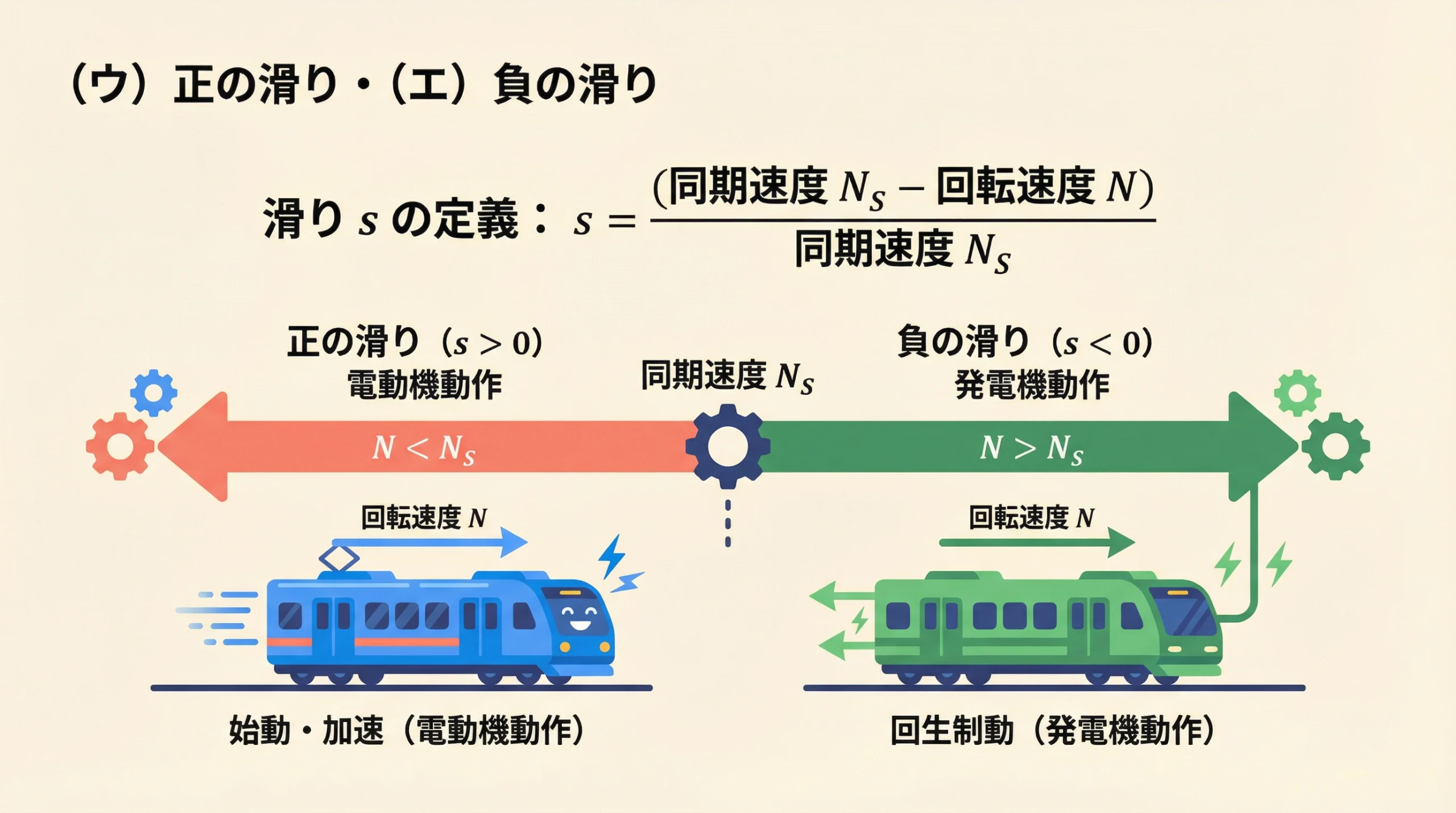
ここは非常に重要なポイントです。滑り \( s \) の定義式を思い出しましょう。
$$ s = rac{N_s – N}{N_s} $$
- \( N_s \) :同期速度(磁界の回転速度)
- \( N \) :回転速度(実際のロータの回転速度)
(ウ)始動・加速するとき(電動機動作)
電車が加速しているときは、モーターとして働いています。このとき、実際の回転速度 \( N \) は同期速度 \( N_s \) よりも遅くなります(\( N < N_s \))。上の式に当てはめると、分子の \( (N_s – N) \) はプラスになるため、滑り \( s \) は「正(プラス)」となります。
(エ)回生制動によって減速するとき(発電機動作)
電車がブレーキをかける(回生制動)ときは、モーターを発電機として働かせ、運動エネルギーを電気エネルギーに変換して電源に戻します。このとき、インバータの周波数を下げて同期速度 \( N_s \) を実際の回転速度 \( N \) よりも遅くします(\( N > N_s \))。上の式に当てはめると、分子の \( (N_s – N) \) はマイナスになるため、滑り \( s \) は「負(マイナス)」となります。
したがって、(ウ)は「正」、(エ)は「負」が正解です。
6. (オ)の解説:ベクトル制御とスカラ制御の違い
最後に、最新の制御方式についての問題です。
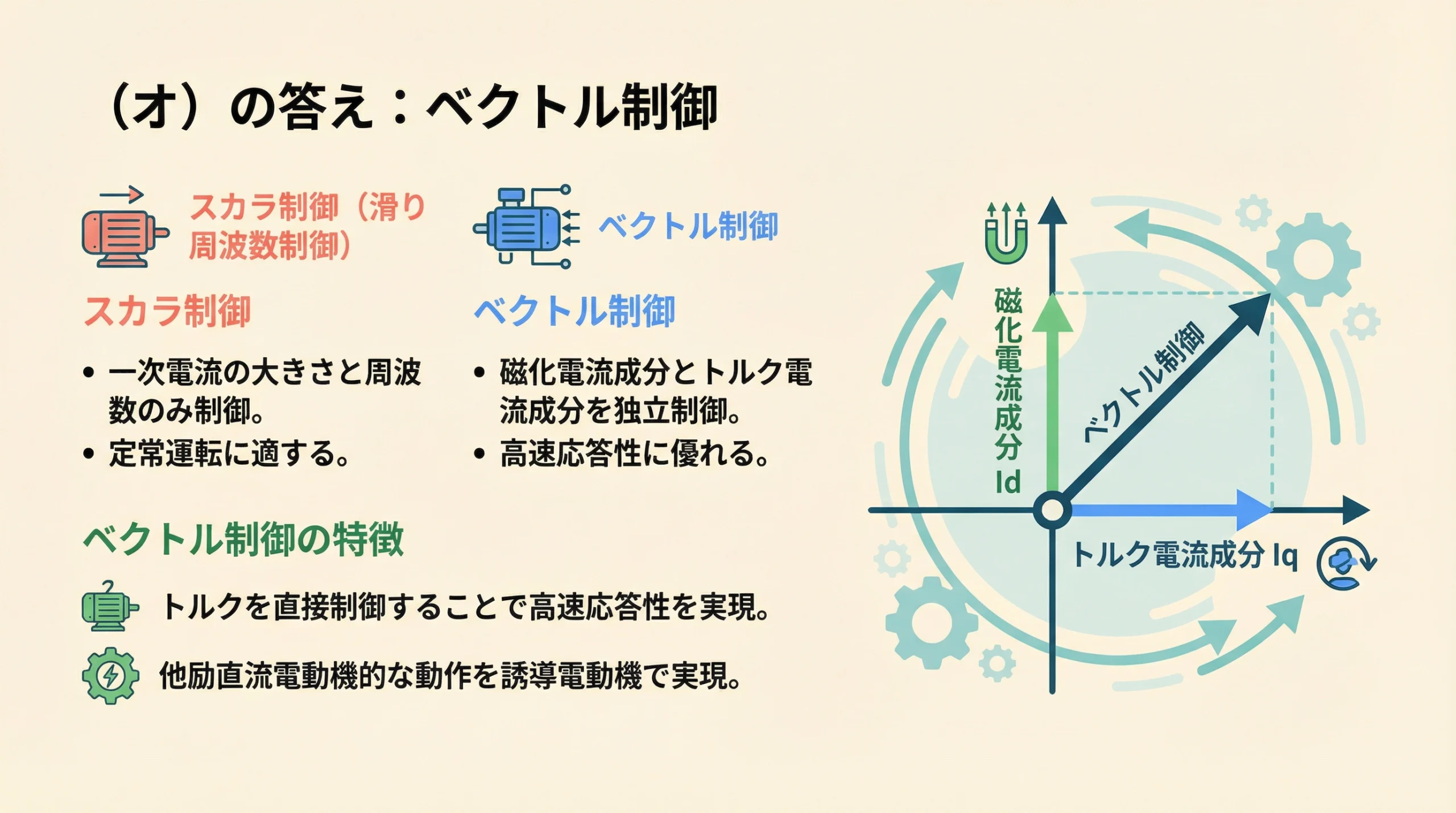
- スカラ制御(V/f制御、滑り周波数制御など):電圧や電流の「大きさ(スカラ量)」と「周波数」のみを制御する方式です。定常的な運転には適していますが、急激な負荷変動に対する応答(過渡応答)には限界があります。
- ベクトル制御:誘導電動機の一次電流を、磁束を作る「磁化電流成分(\( I_d \))」と、トルクを作る「トルク電流成分(\( I_q \))」に直交するベクトルとして分離し、それぞれを独立して制御する方式です。
ベクトル制御を採用することで、誘導電動機でありながら、直流電動機(他励直流電動機)のようにトルクを直接かつ高速に制御することが可能になります。
問題文の「誘導電動機のトルクを直接制御することができる」という記述から、正解は「ベクトル制御」となります。
7. 解答まとめ
これまでの解説をまとめると、以下のようになります。
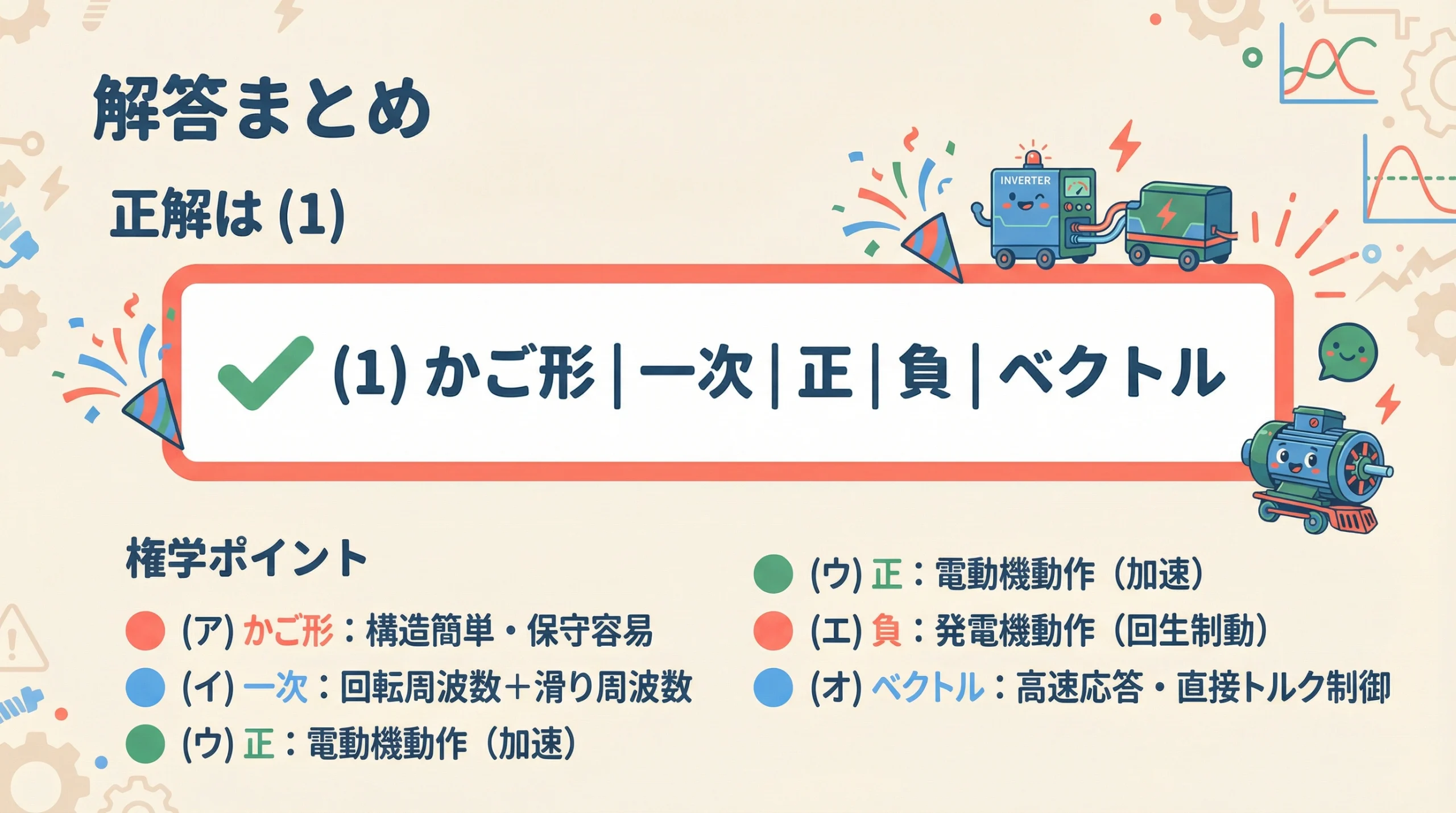
- (ア)かご形:構造が簡単で保守が容易
- (イ)一次:回転周波数+滑り周波数=一次周波数
- (ウ)正:始動・加速(電動機動作)は \( N < N_s \) → \( s > 0 \)
- (エ)負:回生制動(発電機動作)は \( N > N_s \) → \( s < 0 \)
- (オ)ベクトル:トルクを直接制御し高速応答を実現
これらをすべて満たす組み合わせは、選択肢 (1) となります。
8. 試験対策とよくあるミス
重要ポイントのおさらい
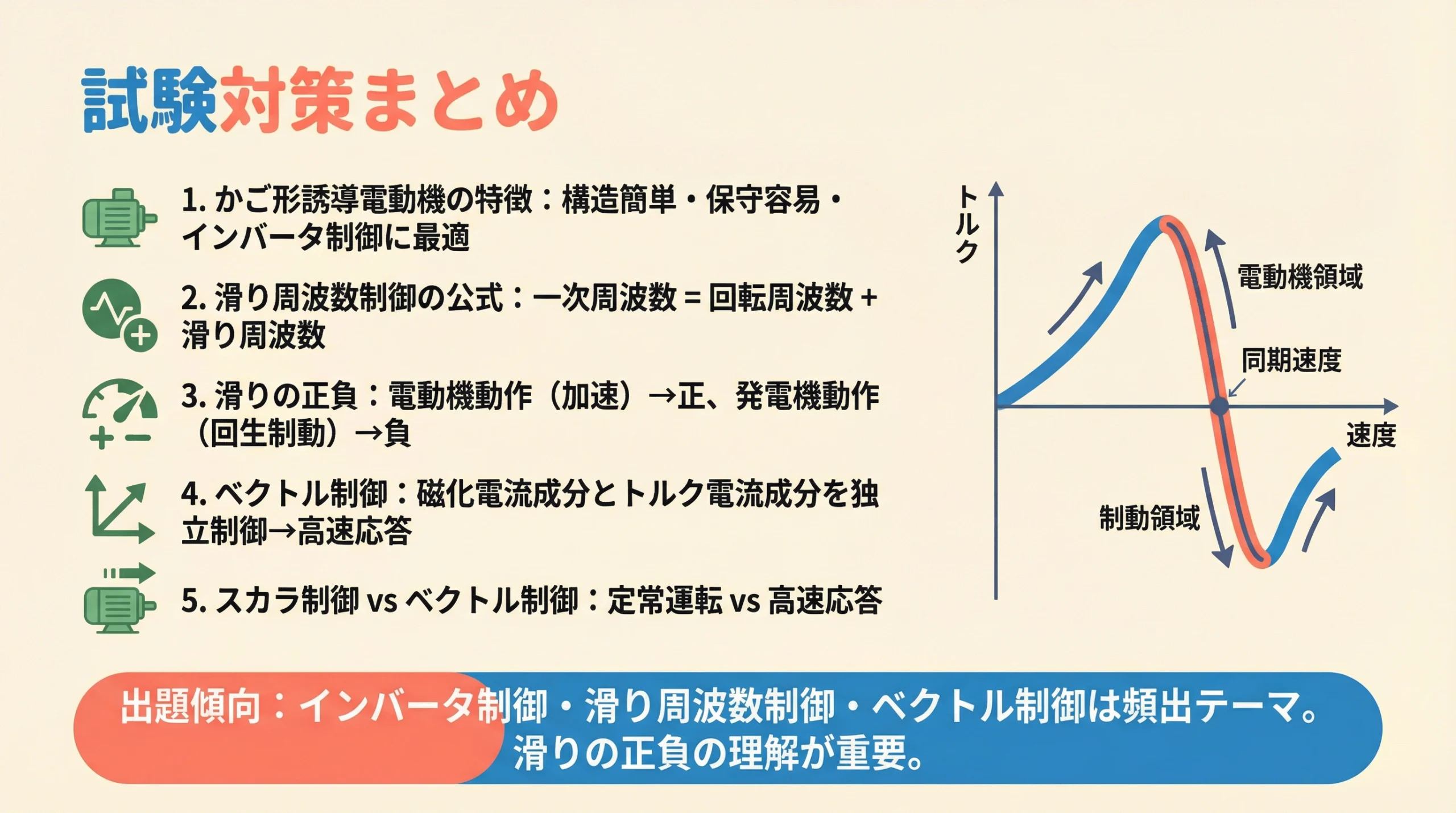
- かご形誘導電動機は、構造が簡単で保守が容易。インバータ制御の主流。
- 一次周波数 \( f_1 = f_r + f_s \) (回転周波数+滑り周波数)。
- 滑りの正負:電動機動作(加速)は「正」、発電機動作(回生制動)は「負」。
- ベクトル制御は、磁化電流とトルク電流を独立制御し、高速応答を実現。
- インバータ制御・滑り周波数制御・ベクトル制御は頻出テーマ。滑りの正負の理解が合否を左右する。
よくあるミス・注意点
- 滑りの正負の勘違い:回生制動時(ブレーキ時)は、回転速度が同期速度を上回るため、滑りがマイナスになることを数式 \( s = (N_s – N) / N_s \) から論理的に導けるようにしておきましょう。暗記に頼ると本番で迷いやすくなります。
- 一次と二次の混同:インバータから供給されるのは固定子側なので「一次」周波数です。二次(回転子側)と混同しないように注意してください。
- ベクトル制御とスカラ制御の逆転:「高速応答性」がキーワードのときはベクトル制御、「定常運転・シンプル」がキーワードのときはスカラ制御(V/f制御)です。
9. FAQ(よくある質問)
Q1. なぜ回生制動のときにインバータの周波数を下げるのですか?
A1. 発電機として動作させるためには、実際の回転速度 \( N \) よりも同期速度 \( N_s \) を低くする(負の滑りを作る)必要があります。同期速度 \( N_s \) は周波数に比例するため、インバータの出力周波数を下げることで同期速度を落とし、ブレーキ力を発生させています。
Q2. ベクトル制御とV/f制御(スカラ制御)はどちらが優れていますか?
A2. 応答性や精密なトルク制御という点では「ベクトル制御」が圧倒的に優れています。しかし、ベクトル制御は複雑な演算処理や正確なモータ定数の把握が必要なため、ファンやポンプなど高度な応答性を求められない用途では、シンプルで安価な「V/f制御」が現在でも広く使われています。用途による使い分けが重要です。
Q3. かご形と巻線形、どちらが電験3種でよく出ますか?
A3. 電験3種では「かご形」の特徴(構造が簡単・保守容易・インバータ制御に最適)が頻繁に問われます。巻線形については「比例推移」や「外部抵抗による始動」の観点から出題されることがあります。両者の違いを整理しておくことが重要です。
Q4. 永久磁石同期電動機(PMSM)は電験3種の試験範囲ですか?
A4. 問題文の末尾に「永久磁石同期電動機を適用しようとする技術的動向がある」という記述がありますが、この問題では直接問われていません。電験3種の試験範囲としては、誘導電動機・同期電動機・直流電動機が中心です。PMSMについては近年の出題傾向として徐々に登場しつつありますが、まずは誘導電動機の基礎をしっかり固めることが優先です。
まとめ
今回は、平成21年度 機械科目 問6を通じて、誘導電動機のインバータ制御の基礎を学びました。
- (ア)かご形:構造が簡単で保守が容易
- (イ)一次周波数:\( f_1 = f_r + f_s \)
- (ウ)正の滑り:電動機動作(始動・加速)
- (エ)負の滑り:発電機動作(回生制動)
- (オ)ベクトル制御:トルクを直接制御し高速応答を実現
正解は選択肢 (1) です。
滑りの概念やベクトル制御の特徴は、電験3種で繰り返し出題される重要テーマです。図解や数式と結びつけて、しっかりと理解を深めておきましょう!




コメント