電験3種の機械科目において、「誘導電動機の速度制御」は頻出かつ非常に重要なテーマです。本記事では、平成18年度の問5を題材に、誘導電動機の速度を変えるための3つの代表的な方法(抵抗制御法、周波数制御法、極数変換法)について、図解を交えながらわかりやすく解説します。
平成18年度 機械科目 問5:問題文と選択肢
まずは、実際に出題された問題文と選択肢を確認してみましょう。
問題文(電験3種 機械科目 平成18年度 問5)
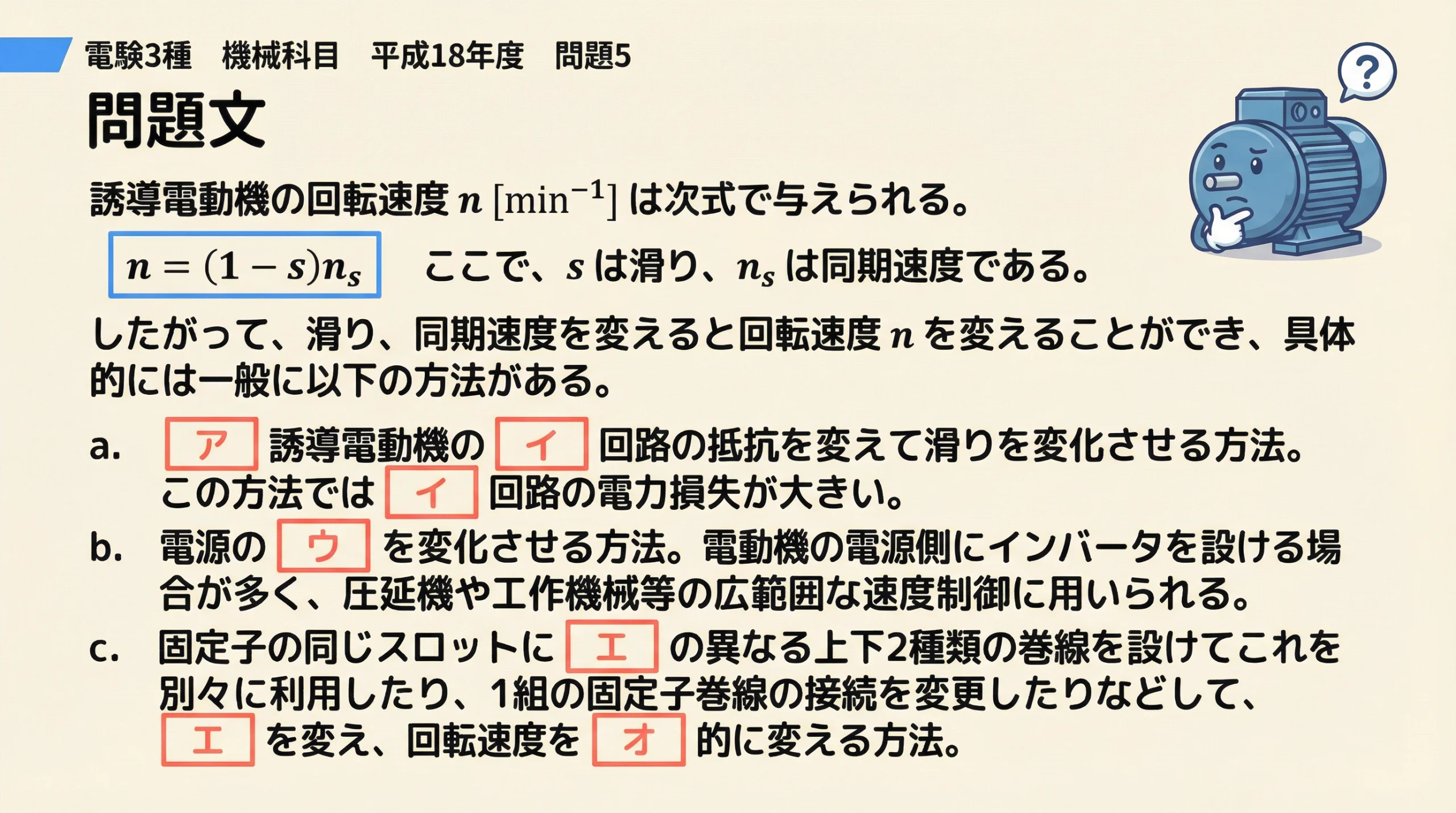
誘導電動機の回転速度 n [min-1] は次式で与えられる。
ここで、s は滑り、ns は同期速度である。したがって、滑り、同期速度を変えると回転速度 n を変えることができ、具体的には一般に以下の方法がある。
a. [ ア ] 誘導電動機の [ イ ] 回路の抵抗を変えて滑りを変化させる方法。この方法では [ イ ] 回路の電力損失が大きい。
b. 電源の [ ウ ] を変化させる方法。電動機の電源側にインバータを設ける場合が多く、圧延機や工作機械等の広範囲な速度制御に用いられる。
c. 固定子の同じスロットに [ エ ] の異なる上下2種類の巻線を設けてこれを別々に利用したり、1組の固定子巻線の接続を変更したりなどして、[ エ ] を変え、回転速度を [ オ ] 的に変える方法。
選択肢(正しい語句の組み合わせを選べ)
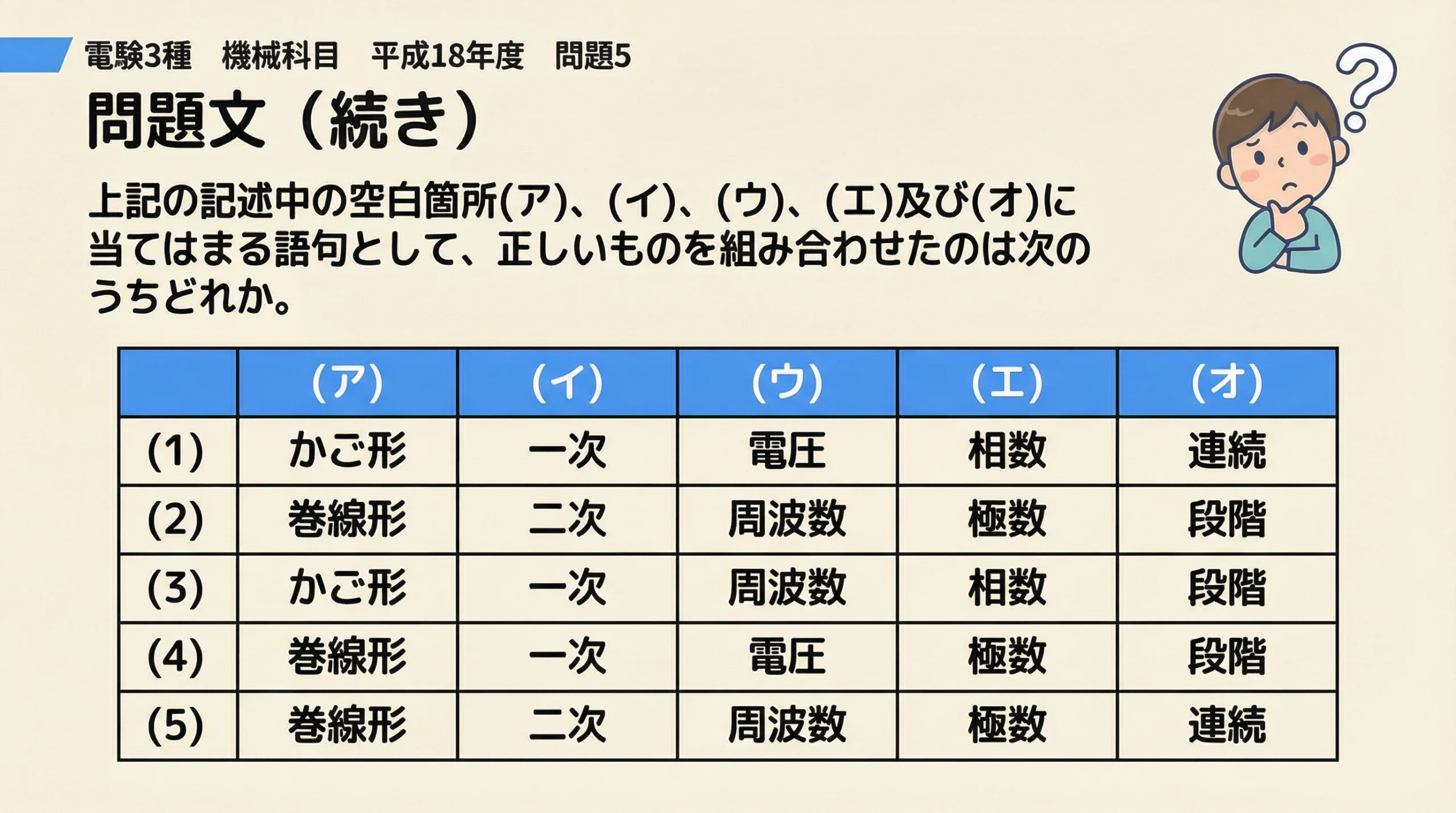
上記の記述中の空白箇所(ア)、(イ)、(ウ)、(エ)及び(オ)に当てはまる語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
|---|---|---|---|---|---|
| (1) | かご形 | 一次 | 電圧 | 相数 | 連続 |
| (2) | 巻線形 | 二次 | 周波数 | 極数 | 段階 |
| (3) | かご形 | 一次 | 周波数 | 相数 | 段階 |
| (4) | 巻線形 | 一次 | 電圧 | 極数 | 段階 |
| (5) | 巻線形 | 二次 | 周波数 | 極数 | 連続 |
誘導電動機の速度制御の基本原理|回転速度の公式を理解しよう
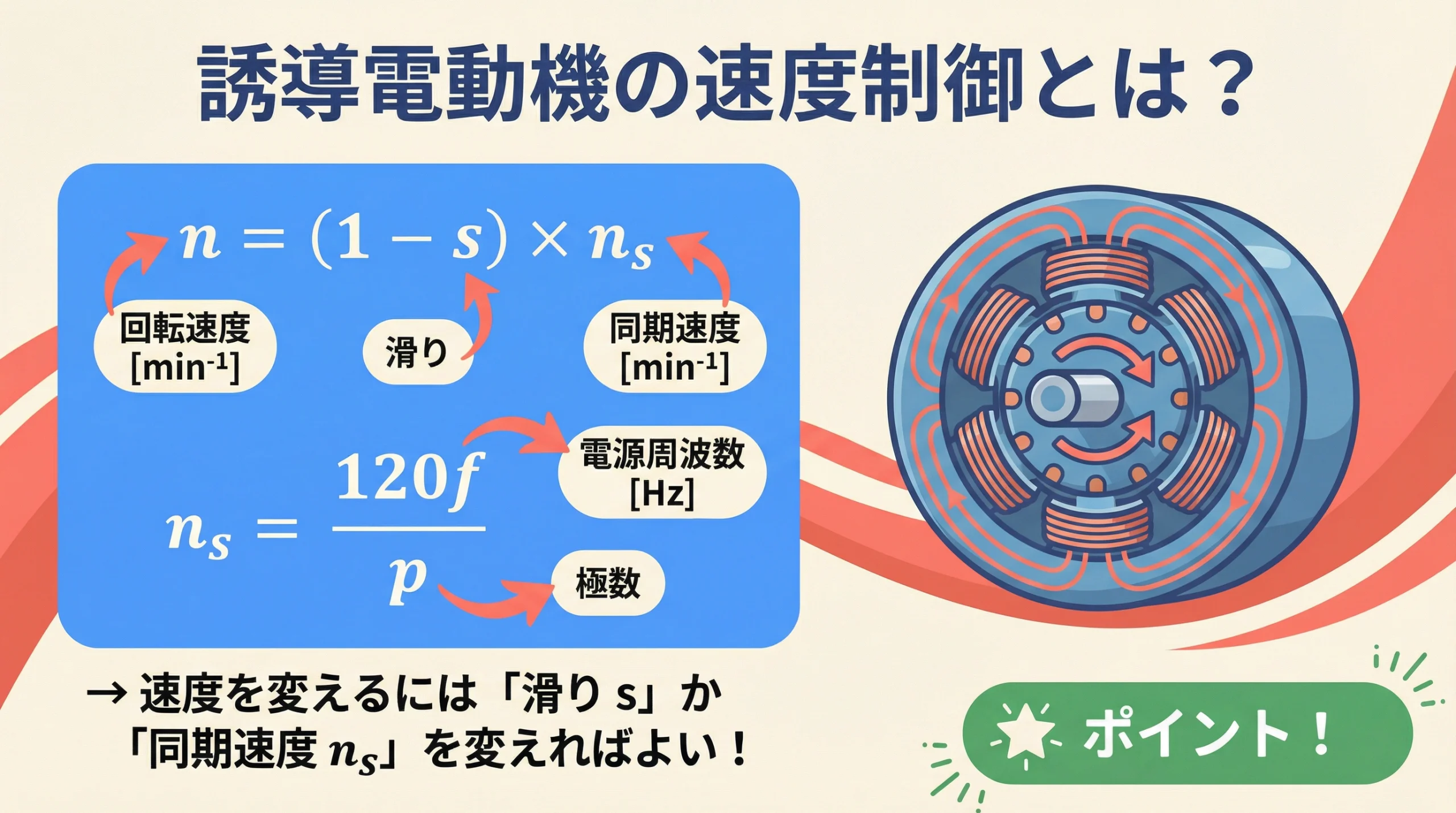
問題の解説に入る前に、速度制御の基本となる公式を確認しておきましょう。誘導電動機の回転速度 n は、以下の式で決まります。
また、同期速度 ns は、電源周波数 f と極数 p によって次のように表されます。
つまり、回転速度を変えるためには、「滑り s」、「周波数 f」、「極数 p」のいずれかを変化させればよいということになります。これが速度制御の3つの基本アプローチです。
3つの速度制御法を詳しく解説
それでは、問題文の a, b, c に対応する3つの制御法について、順番に見ていきましょう。
① 抵抗制御法(二次抵抗制御)|巻線形誘導電動機の速度制御
問題文の a に該当するのが「抵抗制御法」です。
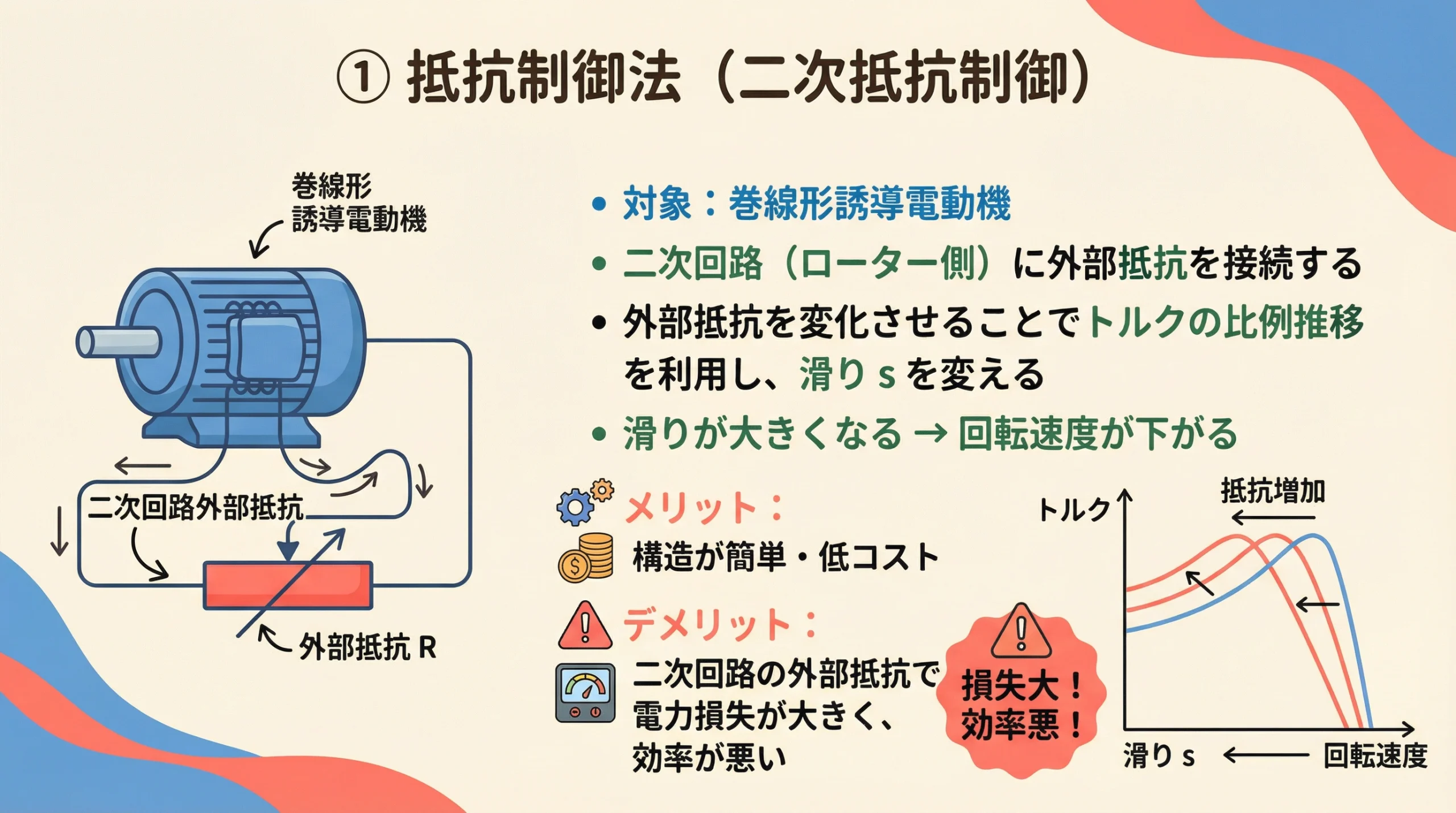
対象モータ:巻線形誘導電動機
巻線形誘導電動機は、回転子(ローター)に巻線が施されており、外部抵抗をスリップリングを介して接続できる構造になっています。かご形誘導電動機では外部抵抗を接続できないため、この制御法は巻線形専用です。
仕組み:回転子側である二次回路に外部抵抗を接続し、その抵抗値を変化させます。これにより「トルクの比例推移」という現象が起こり、滑り s が大きくなって回転速度が下がります。
メリット:構造がシンプルで、導入コストが安い。
デメリット:二次回路に接続した外部抵抗で熱として電力が消費されるため、電力損失が大きく効率が悪いという大きな欠点があります。
したがって、空欄 [ ア ] には「巻線形」、[ イ ] には「二次」が入ります。
② 周波数制御法(インバータ制御・VVVF制御)|広範囲な連続速度制御
問題文の b に該当するのが「周波数制御法」です。
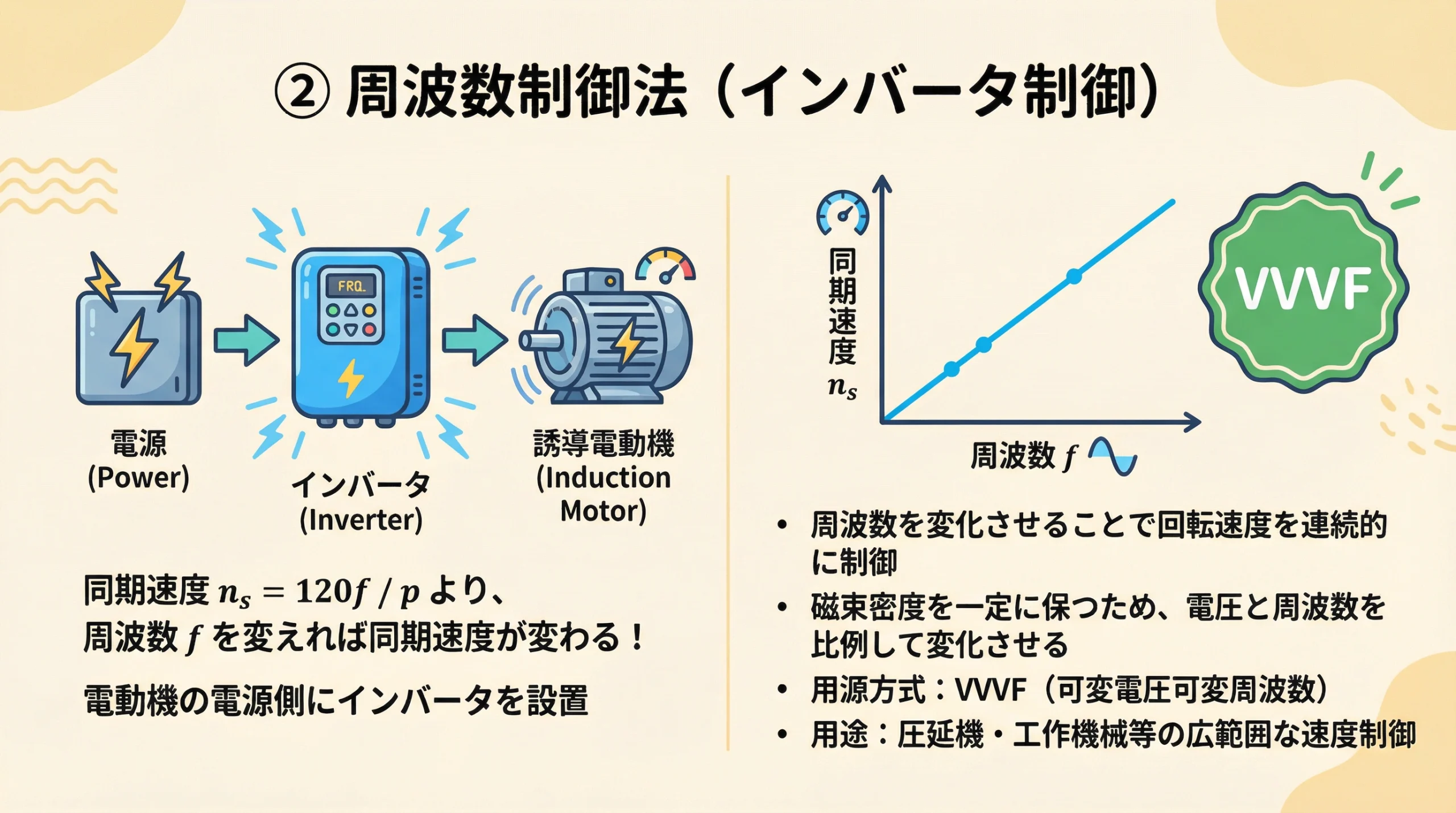
仕組み:同期速度の公式
の通り、電源の周波数 f を変えることで同期速度を変化させます。電動機の電源側にインバータを設置し、周波数を連続的に変化させます。
VVVF制御について:このとき、磁束密度を一定に保つために電圧と周波数を比例して変化させる「VVVF(可変電圧可変周波数)制御」が一般的に用いられます。VVVFは「Variable Voltage Variable Frequency」の略で、電車の走行音でも有名な制御方式です。
用途:効率が良く、広範囲で連続的な速度制御が可能なため、圧延機や工作機械、電車など幅広く利用されています。
したがって、空欄 [ ウ ] には「周波数」が入ります。
③ 極数変換法(段階的速度制御)|固定子巻線の接続変更で極数を切り替える
問題文の c に該当するのが「極数変換法」です。
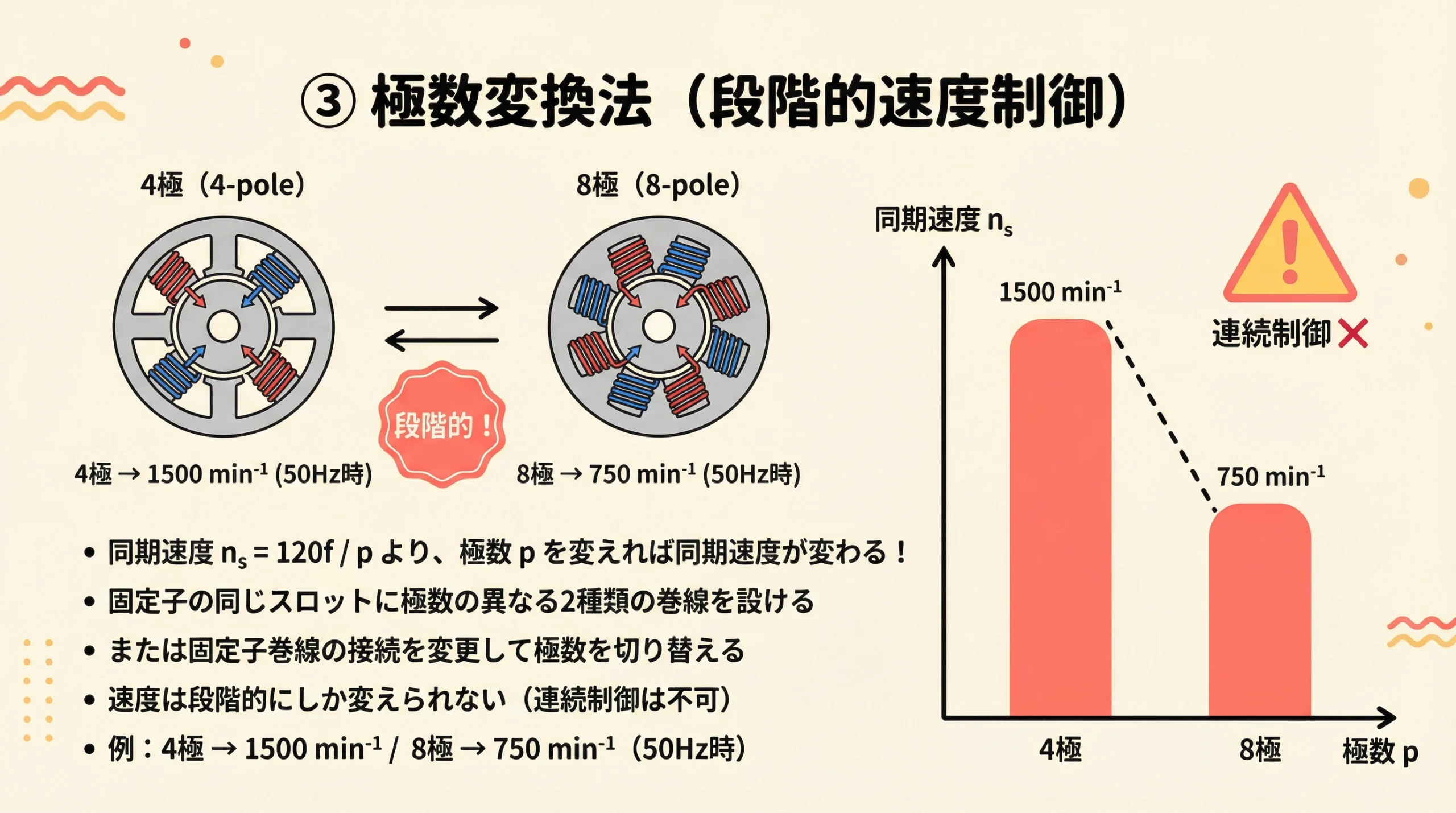
仕組み:同期速度の公式より、極数 p を変えることで同期速度を変化させます。固定子の同じスロットに極数の異なる2種類の巻線を設けたり、巻線の接続を切り替えたりして極数を変更します。
具体例(50Hz時):
注意点:極数は「4極」「8極」といった整数値しかとれないため、速度の変化は段階的になります。インバータのように滑らかで連続的な制御はできません。
したがって、空欄 [ エ ] には「極数」、[ オ ] には「段階」が入ります。
3つの速度制御法の比較まとめ|試験直前の総整理
ここまで解説した3つの速度制御法の特徴を表にまとめました。試験直前の復習に活用してください。
| 制御法 | 対象モータ | 制御対象 | 速度範囲 | 効率 | 主な用途・特徴 |
|---|---|---|---|---|---|
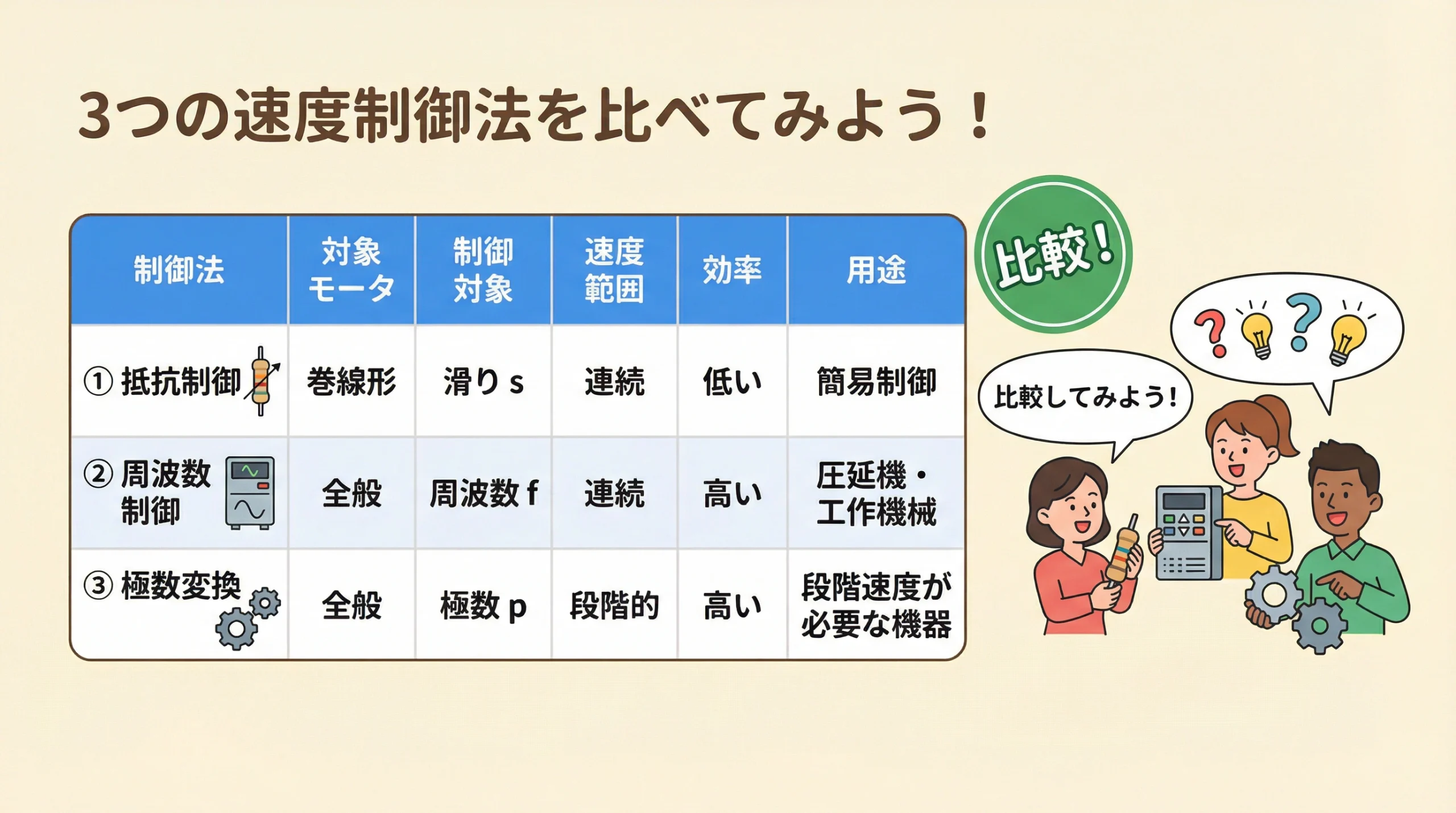
| ① 抵抗制御 | 巻線形のみ | 滑り s | 連続 | 低い | 構造が簡単だが損失大 |
| ② 周波数制御 | 全般 | 周波数 f | 連続 | 高い | インバータ(VVVF)を使用 |
| ③ 極数変換 | 全般 | 極数 p | 段階的 | 高い | 段階的な速度切り替え |
解答と解説|正解は(2)「巻線形・二次・周波数・極数・段階」
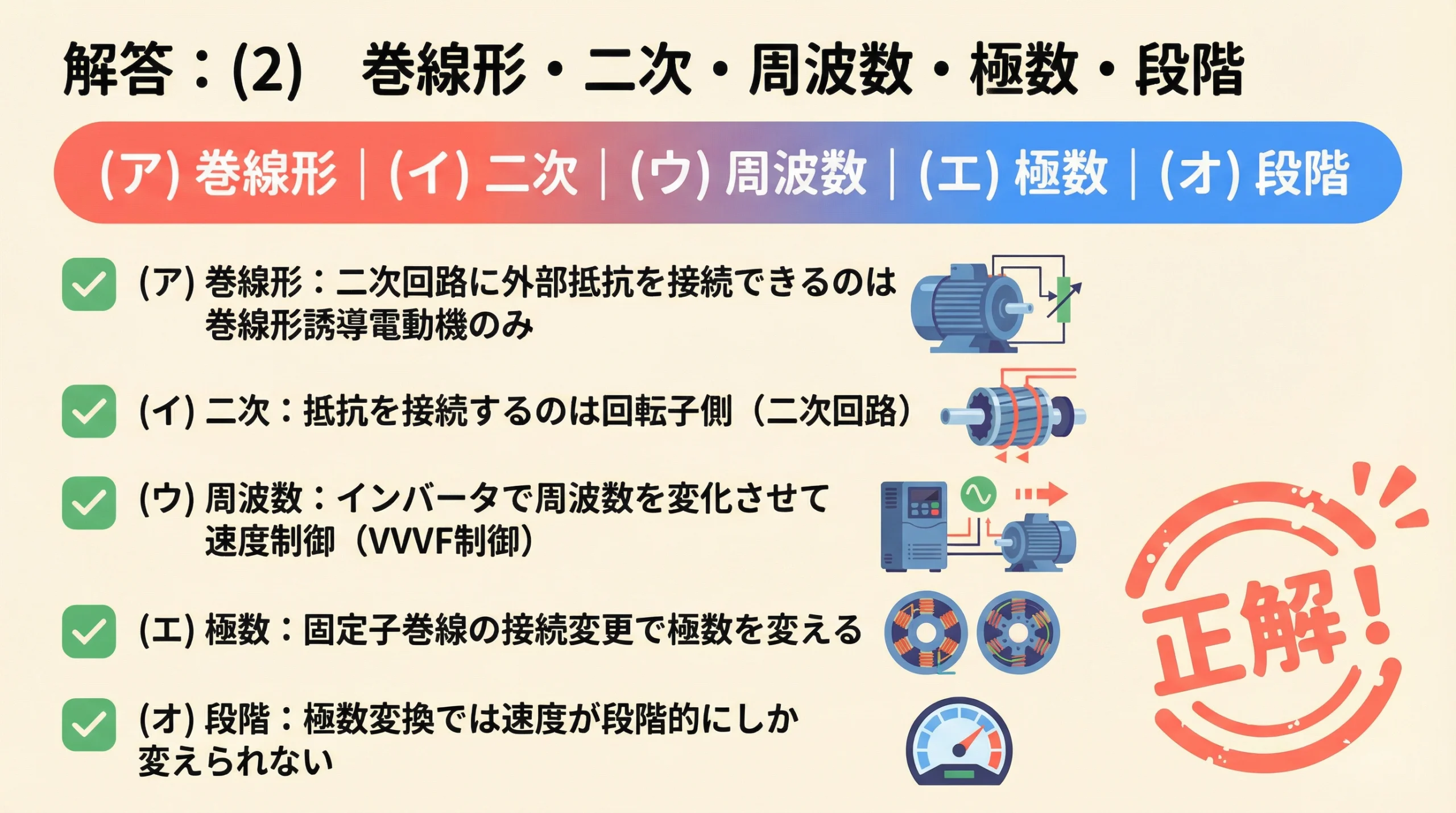
以上の解説から、各空欄に入る正しい語句の組み合わせは以下の通りです。
- (ア) 巻線形:二次回路に外部抵抗を接続できるのは巻線形誘導電動機のみです。かご形では外部抵抗を接続できません。
- (イ) 二次:抵抗を接続するのは回転子側、すなわち二次回路です。一次(固定子)側ではありません。
- (ウ) 周波数:インバータを用いて周波数を変化させることで速度を制御します(VVVF制御)。
- (エ) 極数:固定子巻線の接続変更などで極数を変えます。
- (オ) 段階:極数は整数であるため、速度は段階的にしか変えられません。
よって、正しい選択肢は (2) となります。
試験で狙われるポイント!電験3種 機械科目の合格対策
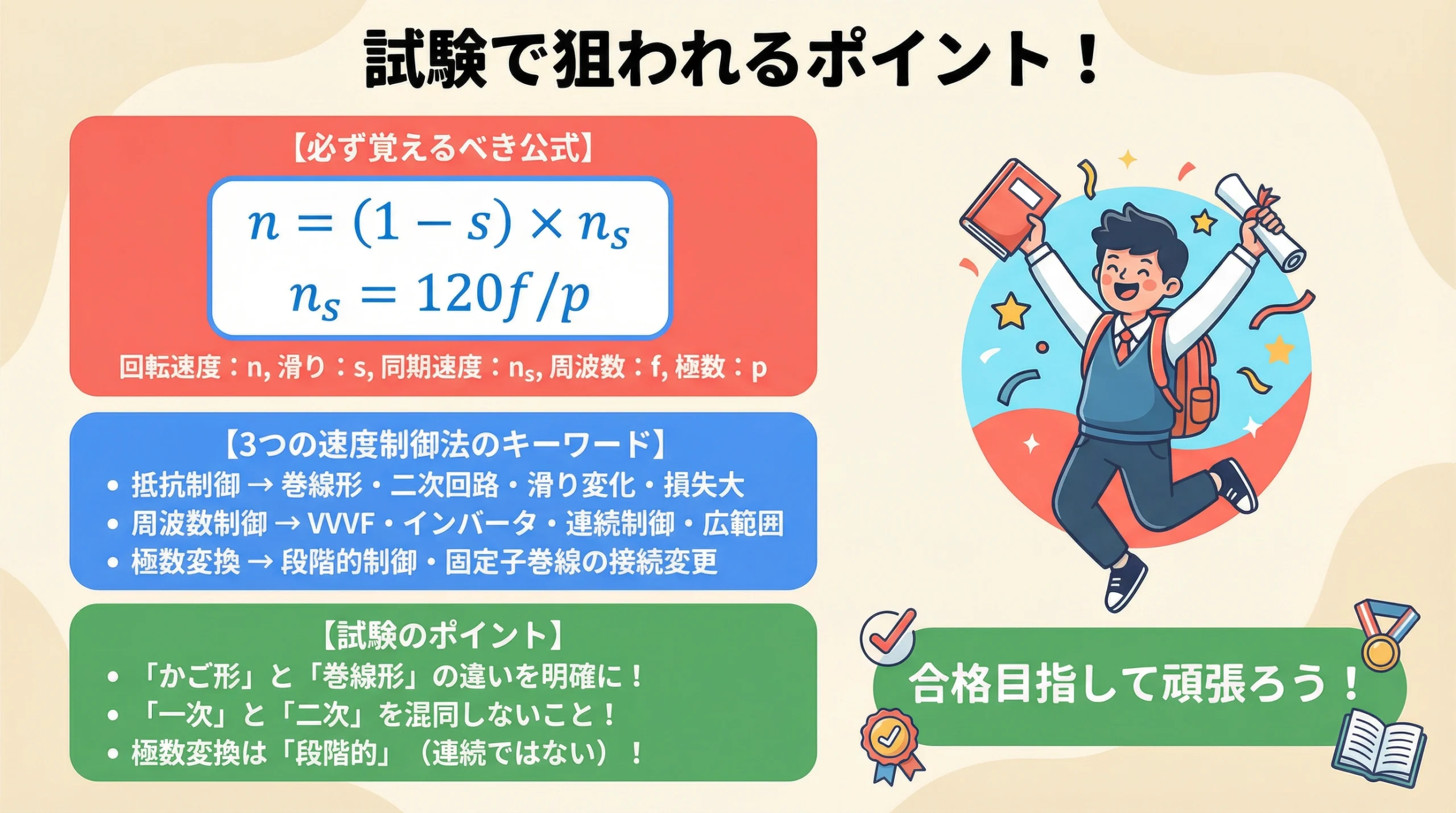
最後に、電験3種の試験でよく狙われる重要ポイントをおさらいしましょう。
必ず覚えるべき公式
回転速度:n、滑り:s、同期速度:ns、周波数:f、極数:p
3つの速度制御法のキーワード
- 抵抗制御 → 巻線形・二次回路・滑り変化・損失大
- 周波数制御 → VVVF・インバータ・連続制御・広範囲
- 極数変換 → 段階的制御・固定子巻線の接続変更
試験のひっかけポイント
- 「かご形」と「巻線形」の違いを明確に!抵抗制御ができるのは巻線形だけです。
- 「一次」と「二次」を混同しないこと!外部抵抗を接続するのは二次(回転子)回路です。
- 極数変換は「段階的」(連続ではない)!これは頻出のひっかけポイントです。
誘導電動機の速度制御は、原理と特徴をセットで理解しておけば確実に得点できる分野です。この記事を参考に、しっかりとマスターしてください!
コメント